Robot Autonome
Projet qui permettra aux futurs étudiants de TGE de fabriquer un robot à batteries, capable de se charger via une prise USB-C et de se déplacer de manière autonome sans causer d’accidents. Pour ce faire, des batteries lithium-ion ont été utilisées. Leur autonomie et les précautions nécessaires à prendre lors de leur charge faisaient en sorte qu’elles étaient idéales pour le projet. Le choix des pièces pour le reste du robot a beaucoup été basé sur des composants utilisés par le passé et que les étudiants qui voudraient refaire le projet seraient en mesure de comprendre. Le robot est aussi conçu pour qu’un étudiant qui veut changer certains modules pour un autre puisse le faire facilement.
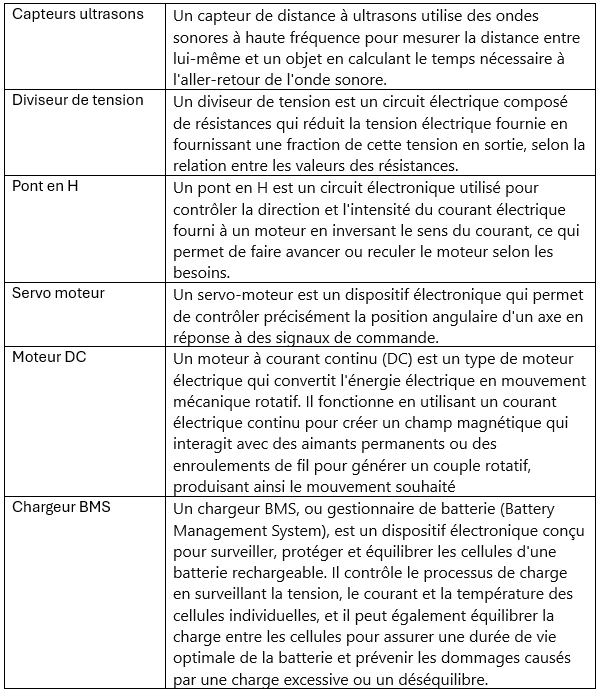
Il est crucial d’avoir un chargeur BMS (Battery Management System) pour la recharge de batteries lithium-ion pour plusieurs raisons :
- Protection contre la surcharge : Le BMS surveille la tension et la température des cellules de la batterie pendant la charge, et il peut couper la charge lorsque la tension maximale est atteinte pour éviter une surcharge, ce qui peut endommager la batterie ou même entraîner un incendie.
- Protection contre la décharge excessive : De la même manière, le BMS peut couper la décharge lorsque la tension minimale est atteinte pour éviter une décharge excessive, qui peut également endommager la batterie et réduire sa durée de vie.
- Équilibrage des cellules : Les cellules individuelles d’une batterie lithium-ion peuvent se décharger à des taux différents, ce qui peut entraîner un déséquilibre de la charge et affecter la performance et la durée de vie de la batterie. Le BMS surveille et équilibre la charge entre les cellules pour garantir une charge uniforme et prolonger la durée de vie de la batterie.
- Protection contre les courts-circuits : Le BMS peut également détecter et réagir aux courts-circuits pour protéger la batterie et le système dans son ensemble.
En résumé, un chargeur BMS est essentiel pour assurer une recharge sûre, efficace et durable des batteries lithium-ion en surveillant et en contrôlant plusieurs aspects de la charge et de la décharge de la batterie.
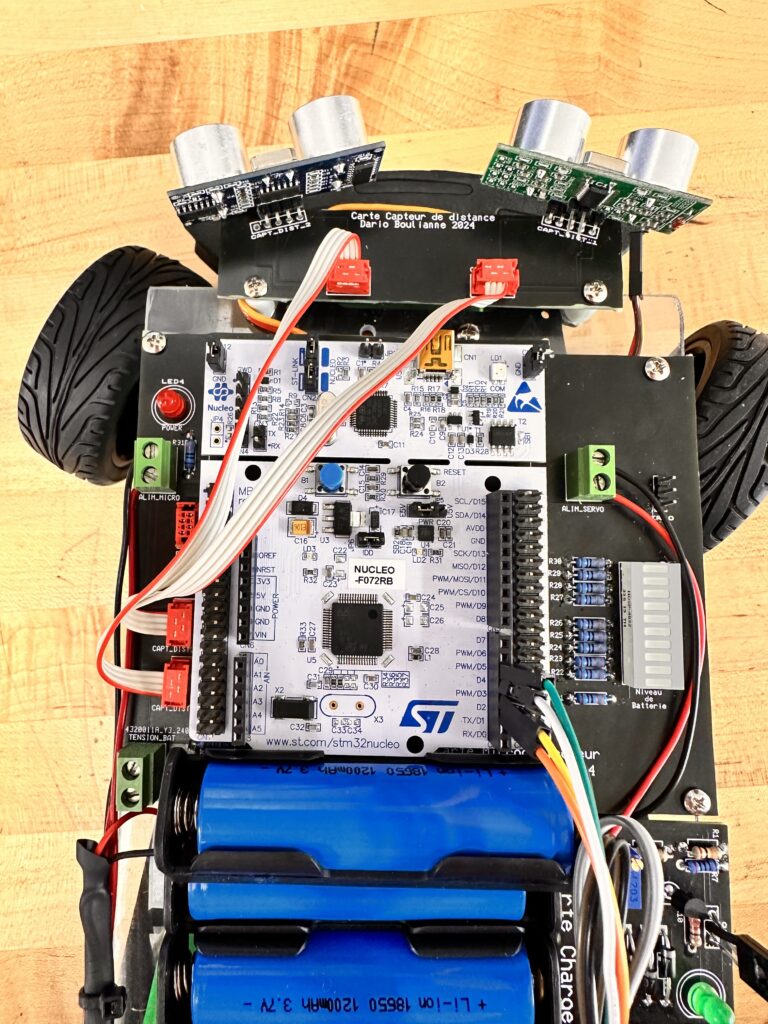
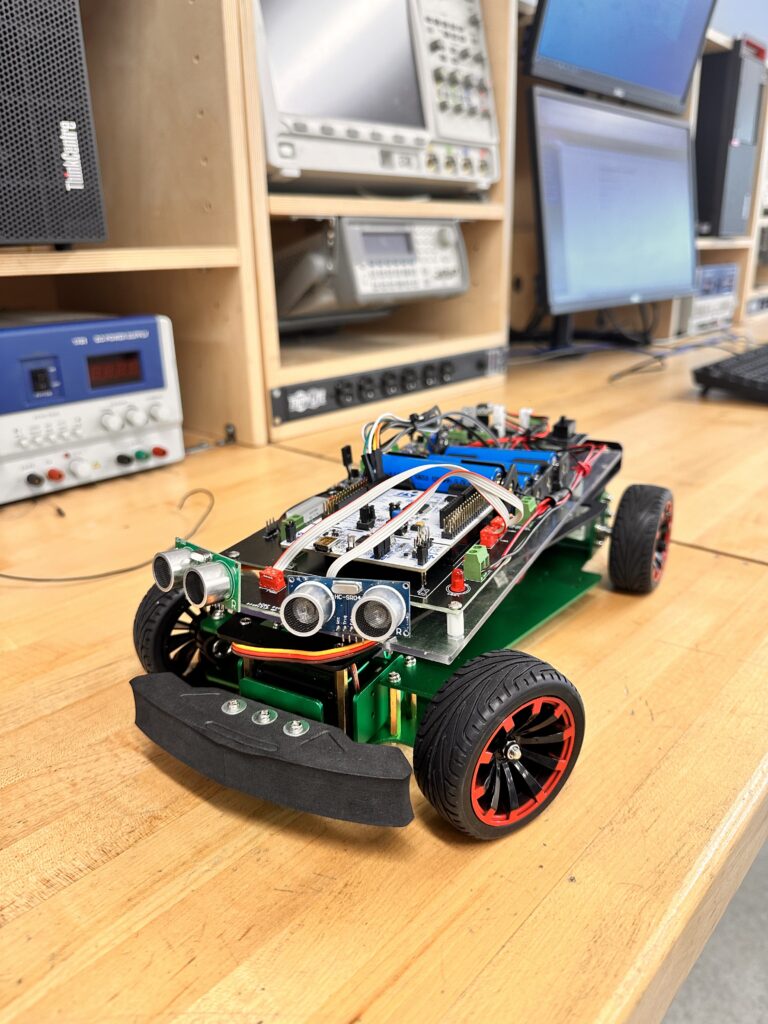
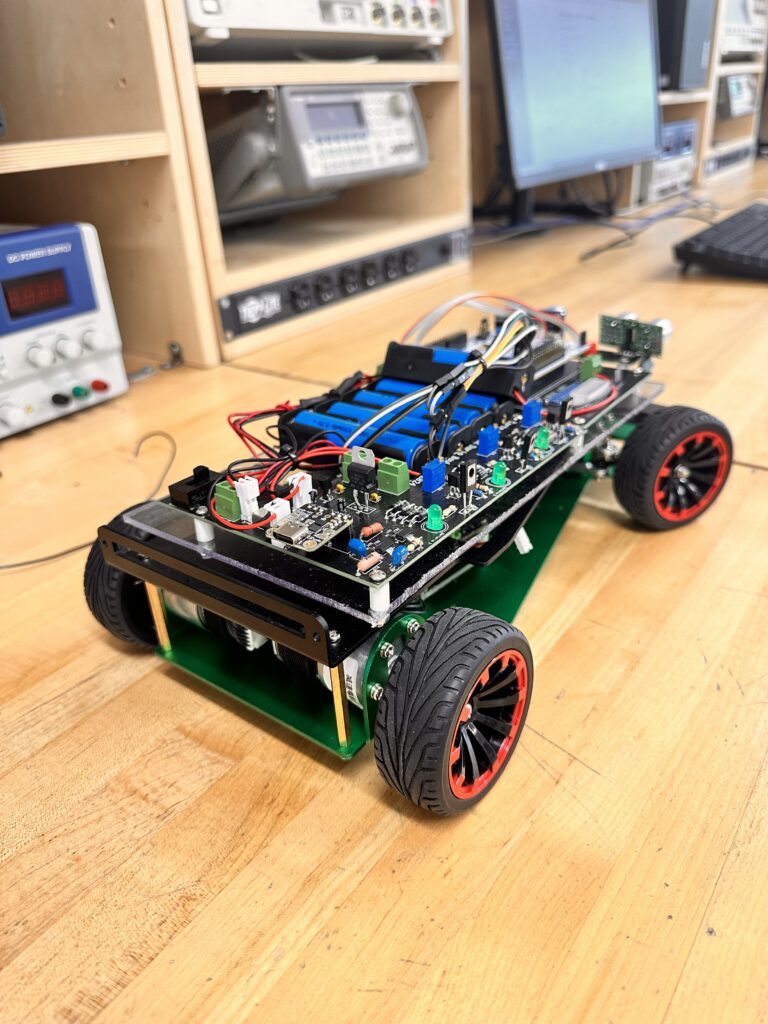
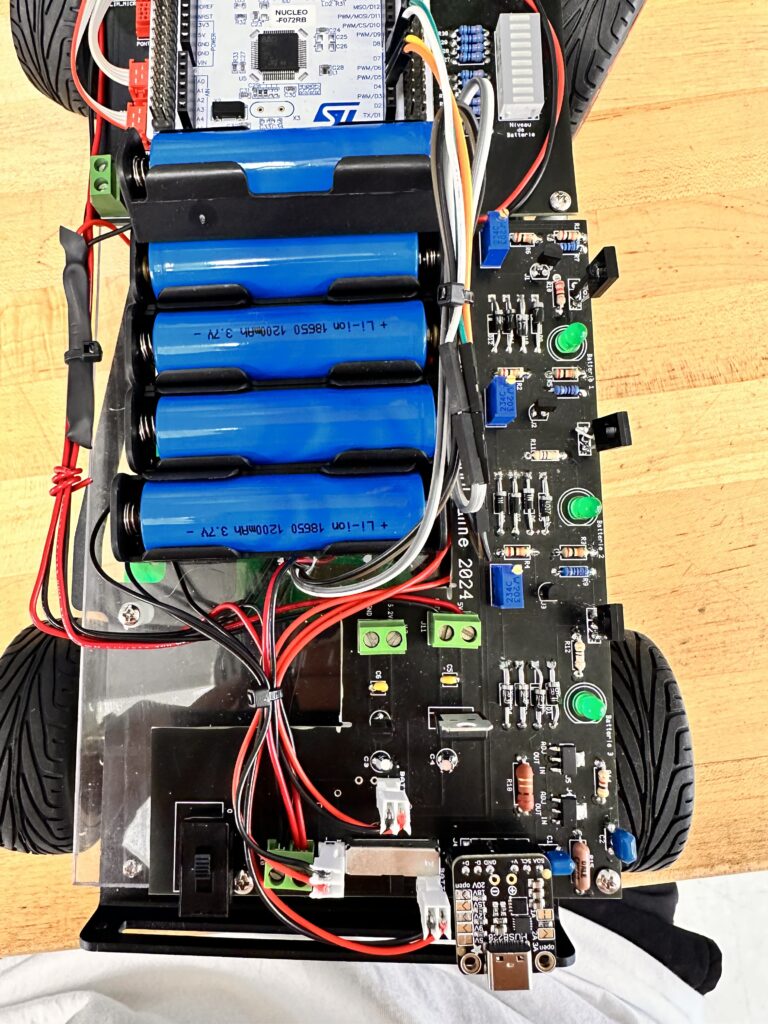
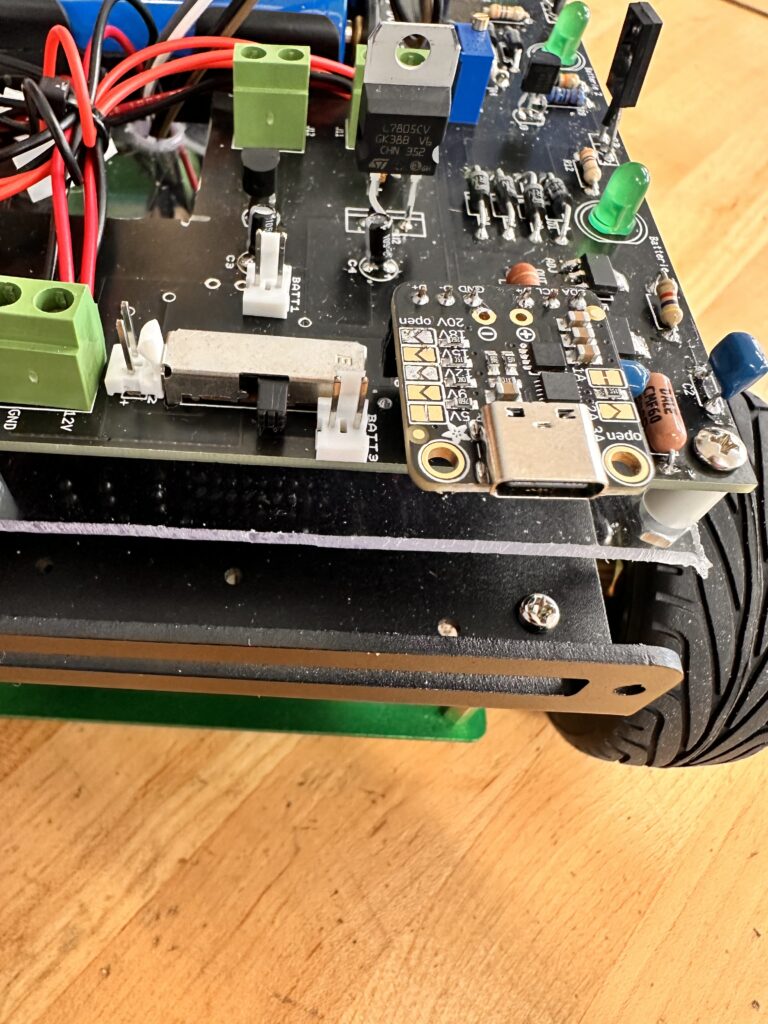
Ces deux modules constituent le cœur du projet. Vous trouverez le microcontrôleur, qui permet d’assimiler l’information des capteurs, charge des batteries pour faire fonctionner le robot. À droite de la carte, vous pouvez voir l’indicateur DEL qui affiche la tension des batteries à l’aide de 10 DELs. Vous avez également les capteurs de distance, qui permettent de détecter si un objet se trouve devant le robot, et ainsi de transmettre l’information au microcontrôleur qui se charge ensuite de faire avancer, reculer ou tourner le robot en conséquence. Le microcontrôleur gère également la communication avec le pont en H, qui contrôle les moteurs DC pour permettre l’avancée, la marche arrière et la gestion de la vitesse de ces derniers.
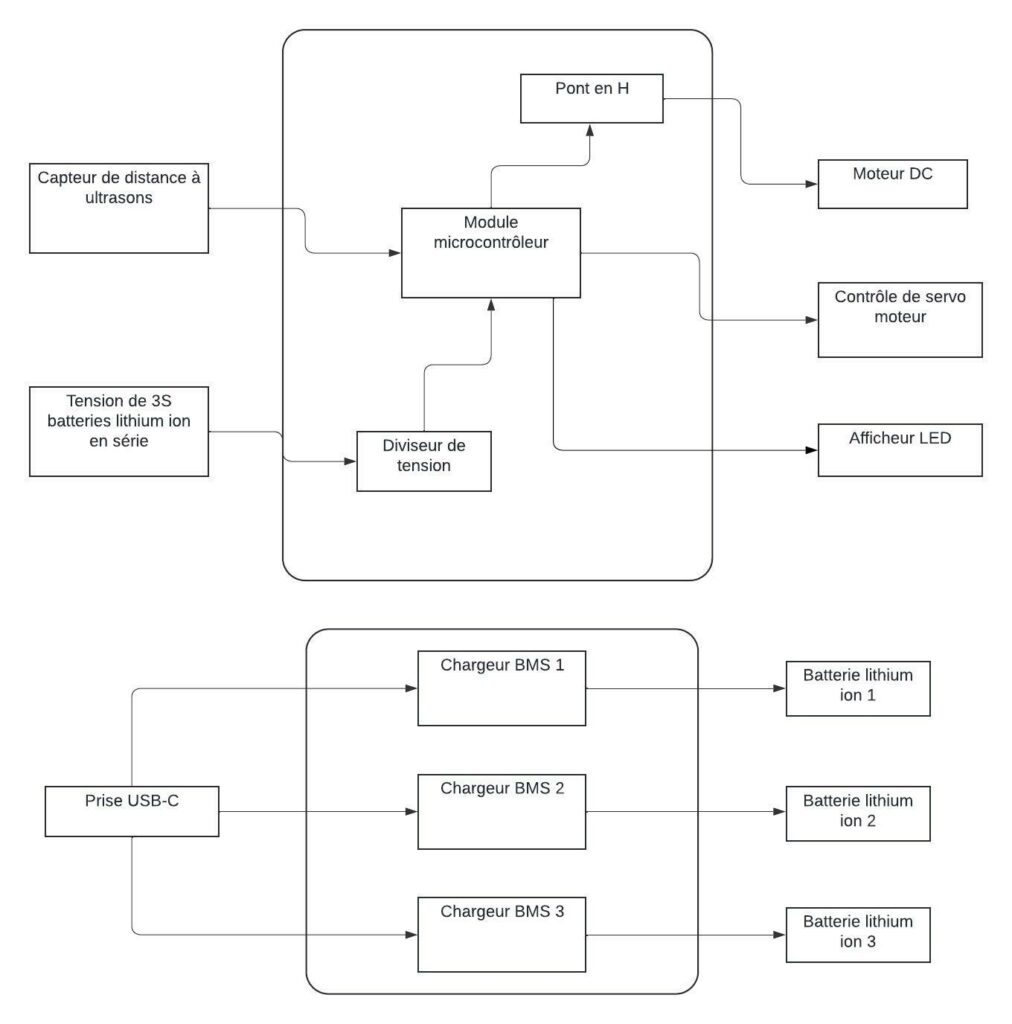
Architecture
Schéma présentant le projet et les connections entre les modules.
Principes utilisés
Interface utilisateur
Charge des batteries : Pour vous assurer du bon fonctionnement du robot, vous devrez parfois charger les batteries. Pour ce faire, il vous suffit de placer l’interrupteur de charge du côté de la prise USB et de brancher un câble USB-C fournissant au moins 18 V mais pas plus de 20 V.
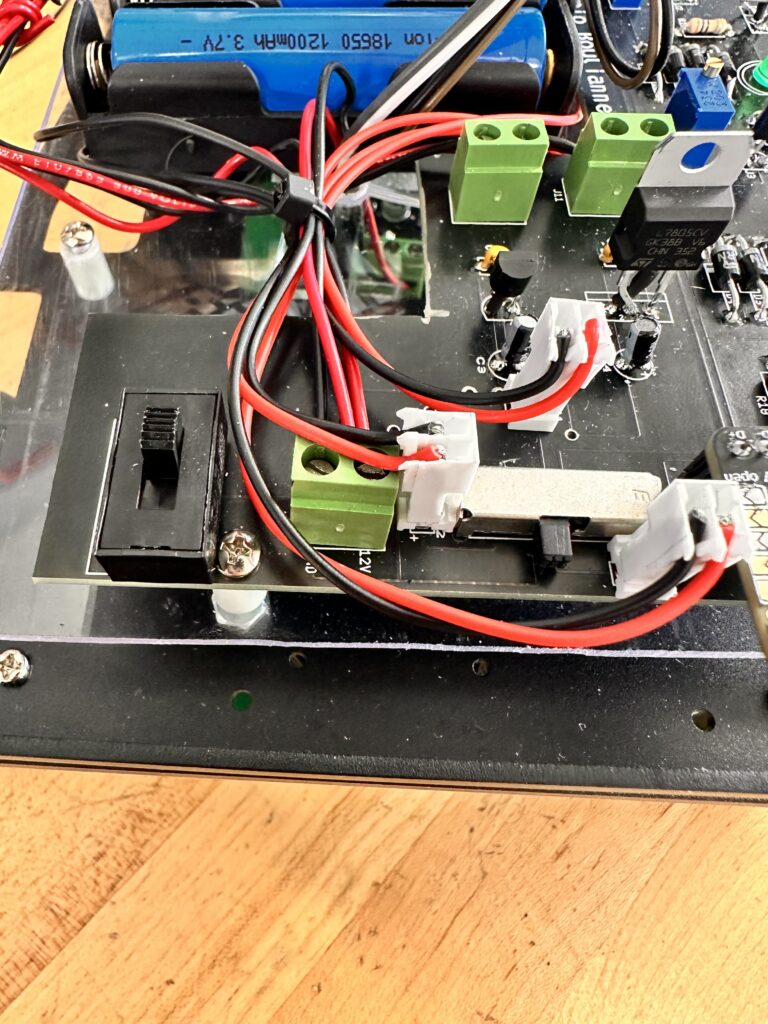
Mise en marche du robot: Puisque le robot est autonome, la mise en marche est très simple. Il suffit de placer l’interrupteur de charge à gauche et d’abaisser l’interrupteur noir qui alimente tous les circuits nécessaires au fonctionnement.
Caractéristique de l’appareil
Température d’utilisation
Les batteries lithium-ion peuvent généralement opérer dans une gamme de températures qui dépend de la chimie spécifique de la batterie, mais voici une estimation générale :
- Température de fonctionnement optimale : 20°C à 25°C
- Température de fonctionnement acceptable : -20°C à 60°C
Cependant, il est important de noter que des températures extrêmes, qu’elles soient chaudes ou froides, peuvent affecter la performance et la durée de vie de la batterie. Par exemple :
- Températures élevées (au-dessus de 45°C) : Peuvent entraîner une dégradation accélérée de la batterie et augmenter les risques de surchauffe ou d’incendie.
- Températures basses (en dessous de 0°C) : Peuvent réduire la capacité de la batterie et la rendre moins efficace.
Autonomie
Le projet utilise des batteries lithium-ion pour alimenter le robot. Ces batteries offrent une autonomie d’environ 15 minutes avant d’être trop déchargées pour continuer à fonctionner efficacement. Une fois cette durée écoulée, il est nécessaire de recharger les batteries pour poursuivre l’utilisation du robot. Ce temps de fonctionnement est optimal pour de courtes sessions d’expérimentation et d’ajustement, permettant de tester et d’affiner les performances du robot entre les cycles de recharge.
Charge du robot
Pour recharger le robot, il est essentiel d’utiliser une prise USB-C capable de fournir une tension de 20 volts. Cette spécification est nécessaire pour assurer une charge rapide et sécurisée des batteries lithium-ion du robot. Veuillez vérifier que votre adaptateur USB-C répond à cette exigence avant de commencer le processus de recharge afin de garantir un fonctionnement optimal et prolonger la durée de vie des batteries.
Décharge
Il est important de recharger les batteries du robot dès que l’indicateur montre qu’elles sont déchargées. Une décharge profonde peut endommager les batteries lithium-ion et réduire leur durée de vie. Pour garantir des performances optimales et prolonger la longévité des batteries, veuillez les recharger immédiatement lorsqu’elles atteignent un niveau bas.
Détection d’obstacle
Le capteur de distance à ultrason HC-SR04 a certaines limites d’utilisation. Il peut détecter des objets situés à une distance comprise entre 2 cm et 400 cm, avec une précision de l’ordre de quelques millimètres. Cependant, il fonctionne de manière optimale dans une plage de 2 cm à 200 cm. Pour ce projet, le robot est programmé pour réagir lorsque la distance d’un objet est comprise entre 5 cm et 25 cm. Cela permet d’assurer une détection fiable et une réaction appropriée pour éviter les collisions
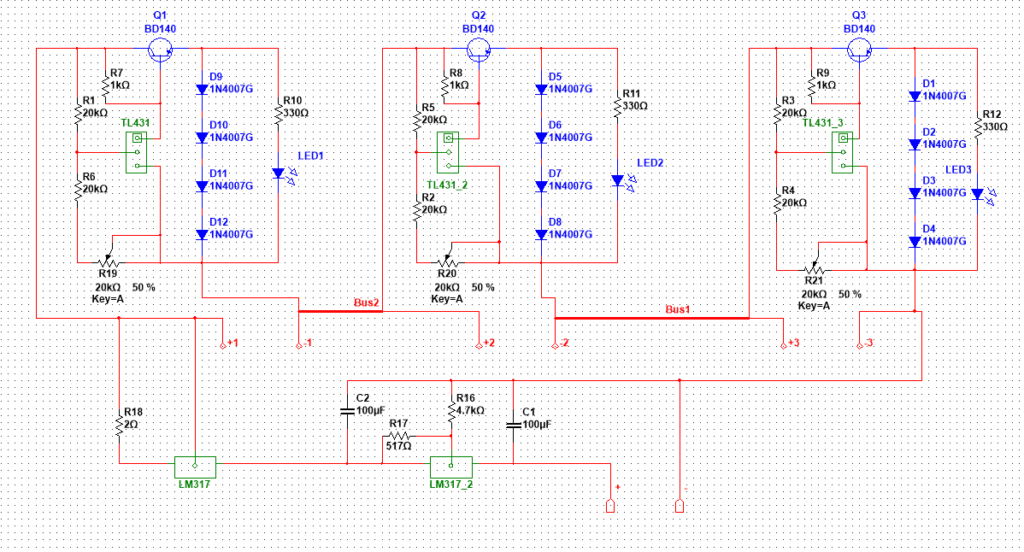
Schéma électrique
Proudly powered by WordPress