Robot Balance
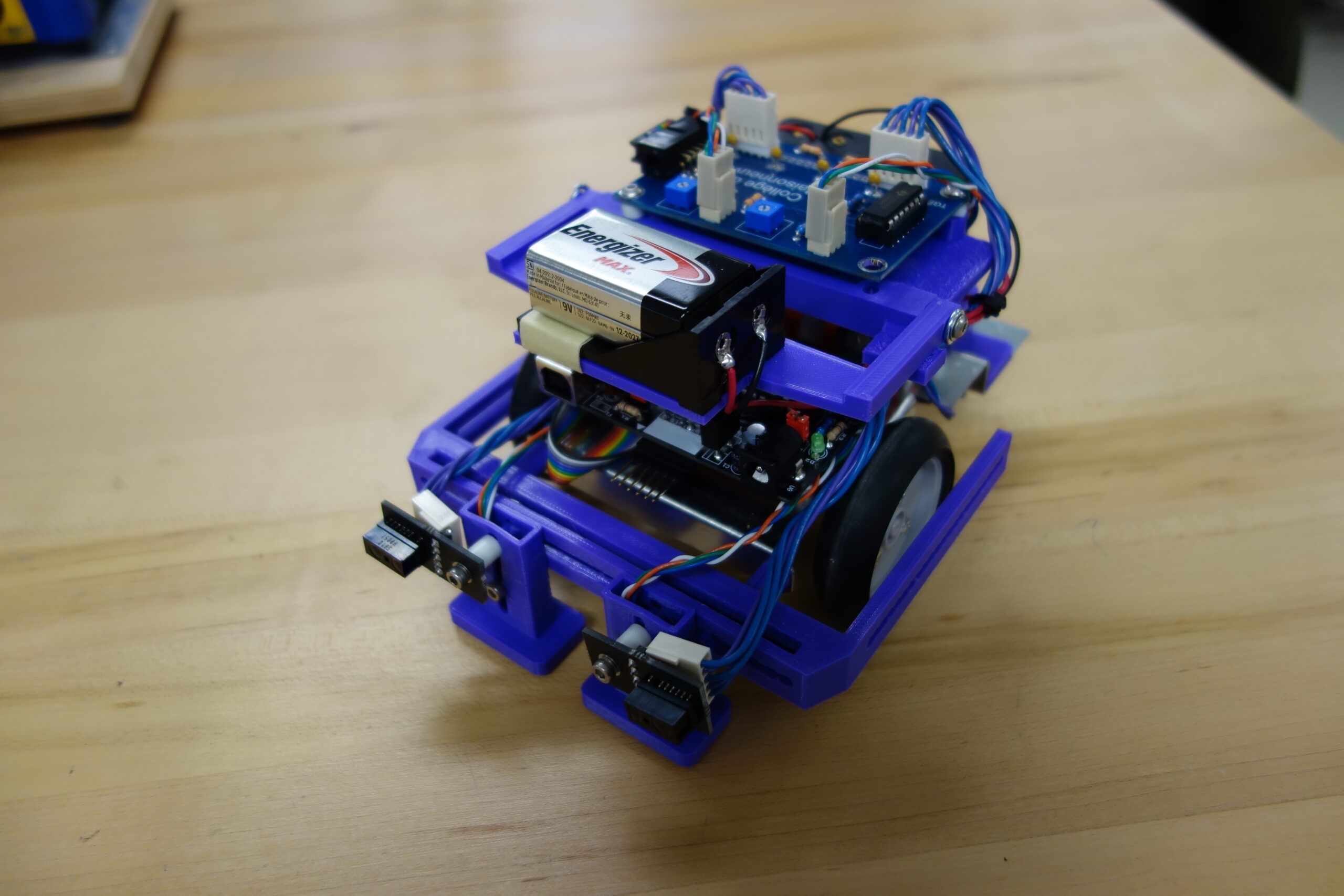
Le Robot Balance 2023 est une évolution du robot 2017. Les objectifs de la nouvelle version sont :
- Enlever les fils d’alimentation : Le robot est maintenant alimenté par une batterie 12V.
- Surélever le centre de gravité pour améliorer le contrôle. La batterie est située en haut du robot.
- Pouvoir commander et observer le robot sans fils : La carte LPC1768 est remplacée par une carte à base de ESP32 (Wifi & Bluetooth).

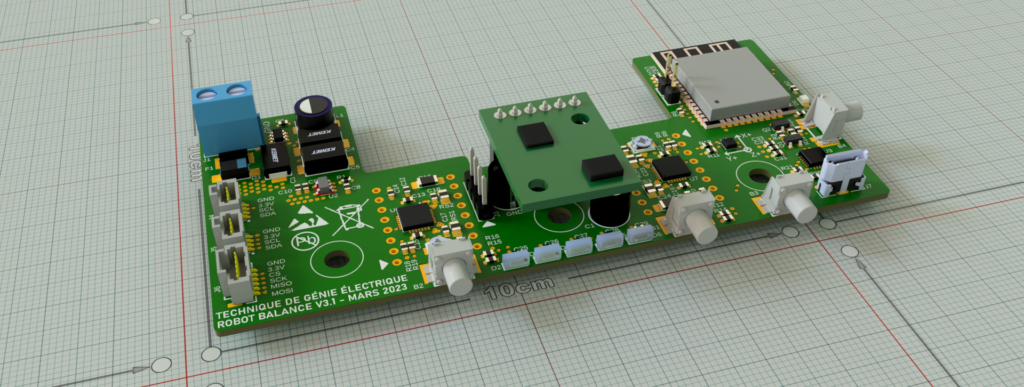
Électronique
La carte électronique est développée dans Fusion 360 et elle est basée sur :
- Un microcontrôleur ESP32-WROOM-32.
- Deux commandes moteur Polulu A4988.
- Un capteur MXC6655.
- Un capteur CMPS12.
- Des régulateurs d’alimentation AP63205 et AP2112K.
Firmware
Le firmware est développé à l’aide de l’outil PlatformIO. Nous utilisons le framework Arduino. Le contrôle se fait à l’aide d’un contrôleur de type Proportionnel-Intégral-Dérivé (PID).
Détails du projet
- Utilisation de moteurs pas à pas : Les moteurs pas à pas de type NEMA-17 sont choisis pour entraîner les roues du robot. Ces moteurs offrent un contrôle précis du mouvement et une grande fiabilité, ce qui est essentiel pour maintenir l’équilibre du robot sur deux roues. Leur capacité à effectuer des mouvements pas à pas permet un contrôle fin de la vitesse et de la direction, contribuant ainsi à la stabilité globale du robot.
- Intégration de gyroscope et d’accéléromètre pour obtenir l’inclinaison : Le robot est équipé d’un gyroscope et d’un accéléromètre, tels que le capteur MXC6655 et le capteur CMPS12. Ces capteurs sont utilisés pour mesurer l’inclinaison du robot par rapport à l’horizontale. En combinant les données de ces capteurs, le système peut détecter les mouvements du robot et ajuster en conséquence pour maintenir son équilibre. Cette intégration de capteurs permet une rétroaction en temps réel, ce qui est crucial pour le contrôle dynamique du robot.
- Utilisation de régulateurs buck et linéaires pour l’alimentation : Le projet utilise des régulateurs buck et linéaires, tels que les régulateurs d’alimentation AP63205 et AP2112K, pour fournir une alimentation stable au système. Les régulateurs buck permettent de réduire la tension d’entrée à un niveau approprié, tandis que les régulateurs linéaires fournissent une tension constante avec peu de fluctuations. Cette combinaison de régulateurs assure une alimentation fiable et régulée pour tous les composants du robot, ce qui est essentiel pour garantir des performances cohérentes et sûres.