Distributeur Connecté pour Chat
Préparez-vous à une innovation majeure dans la gestion alimentaire de vos compagnons félins ! Le distributeur automatique pour chats est une solution ingénieuse qui prend en charge la nourriture de votre animal de compagnie de manière autonome et efficace. Plus besoin de vous soucier des repas de votre chat, laissez cet appareil révolutionnaire s’occuper de tout, vous offrant ainsi une tranquillité d’esprit totale. Avec cette technologie de pointe, simplifiez votre quotidien et offrez à votre félin une expérience alimentaire optimale, tout en vous concentrant sur les moments importants de la vie.

Caractéristique de l’appareil
- Distribution automatique des croquettes à des heures prédéfinies pour assurer une alimentation régulière et équilibrée.
- Système de balise au cou du chat permettant l’ouverture automatique de la porte du bol, assurant ainsi un accès sécurisé à la nourriture. La balise a une durée de vie de 12 mois.
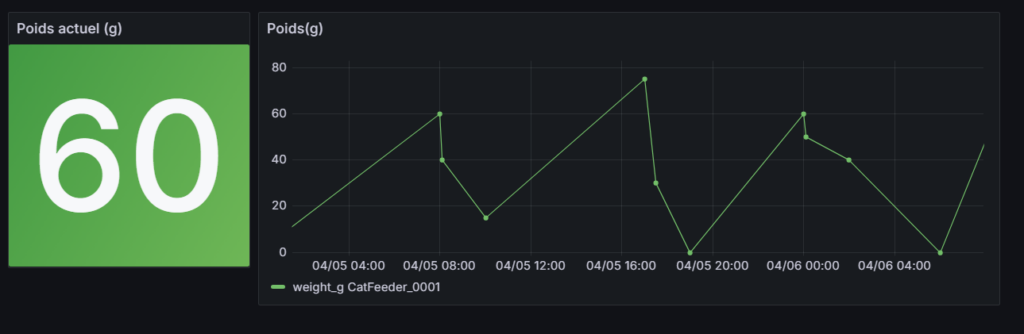
- Intégration d’une balance pour surveiller le poids du bol et enregistrer l’historique d’appétit du chat, offrant ainsi des données essentielles pour la santé et le bien-être de votre animal.
- Connectivité WiFi permettant d’accéder à un site web pour consulter l’historique du poids et synchroniser l’heure de distribution des repas, offrant ainsi un contrôle total et une gestion simplifiée de l’alimentation de votre félin.
- Système d’alimentation sans interruption (UPS) pour la distributrice, assurant un fonctionnement continu en cas de panne de courant et garantissant ainsi la disponibilité des repas pour votre chat.
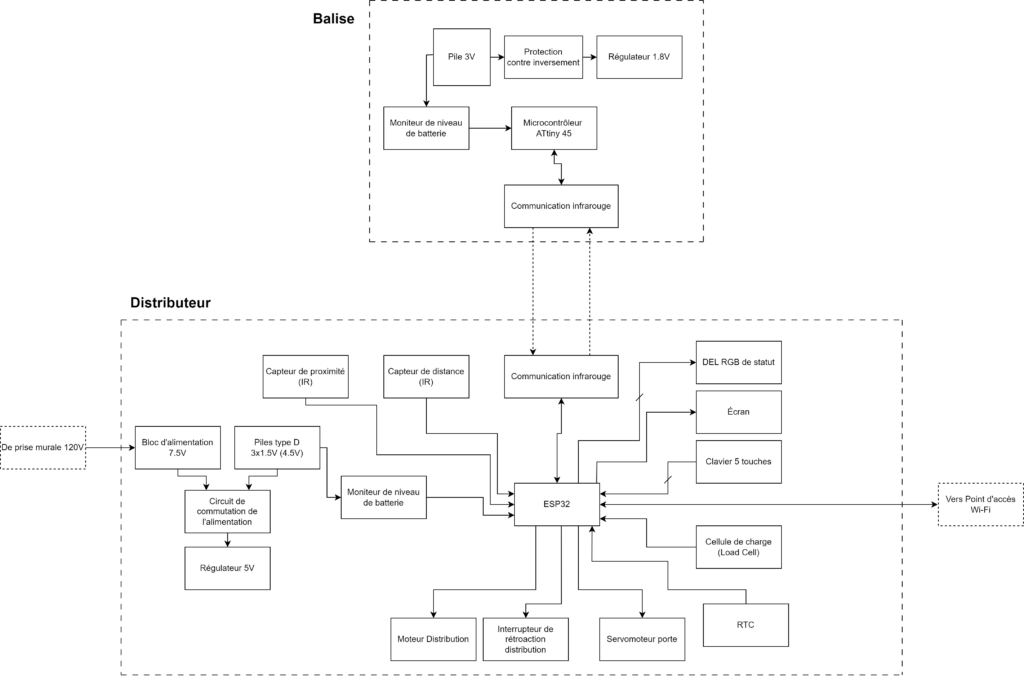
Schéma d’architecture
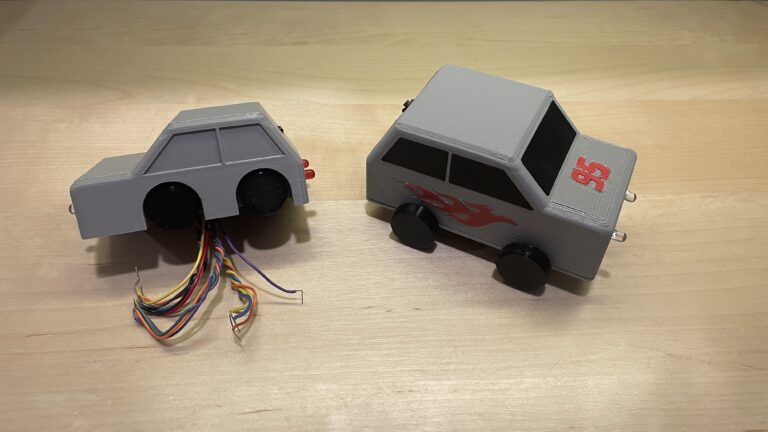
Le projet comprend deux modules : le distributeur, qui verse des croquettes dans son bol, et la balise, qui permet d’identifier le chat. Les deux communiquent ensemble via infrarouge afin de savoir si c’est bien le bon chat qui vient manger.
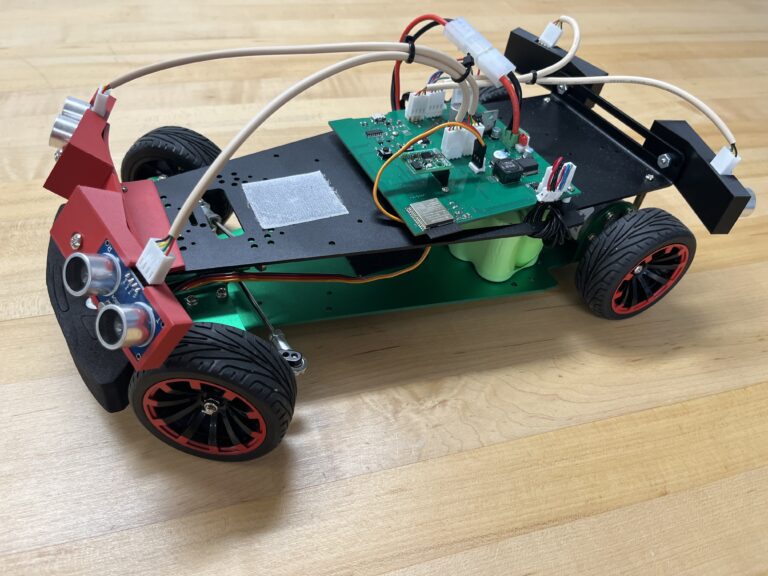
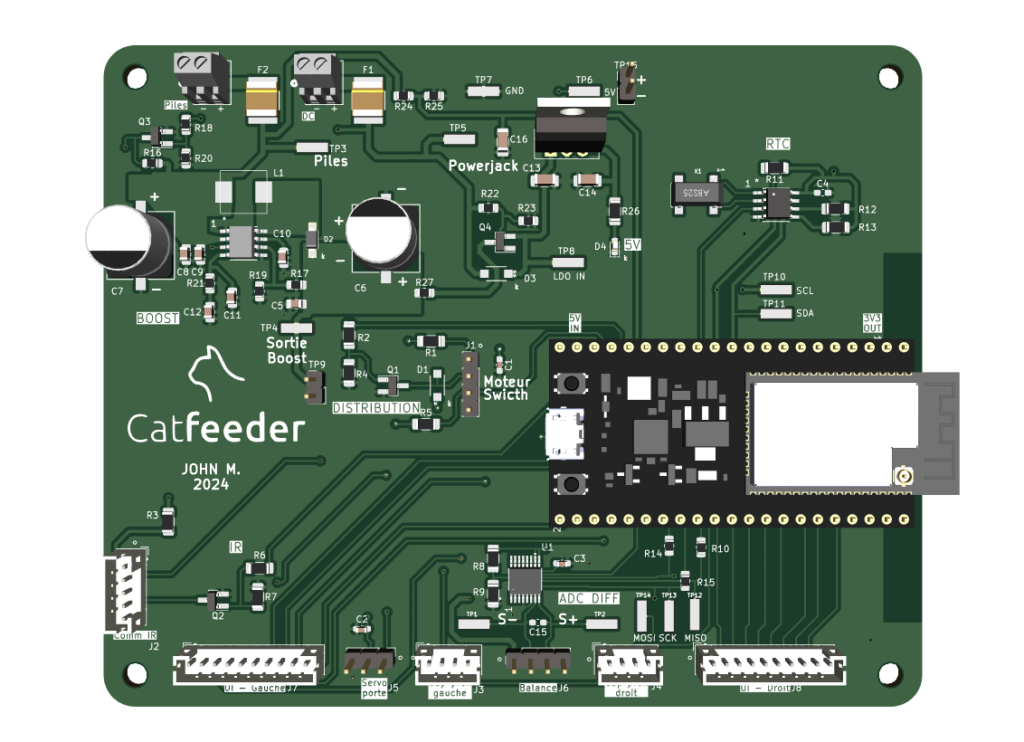
PCB
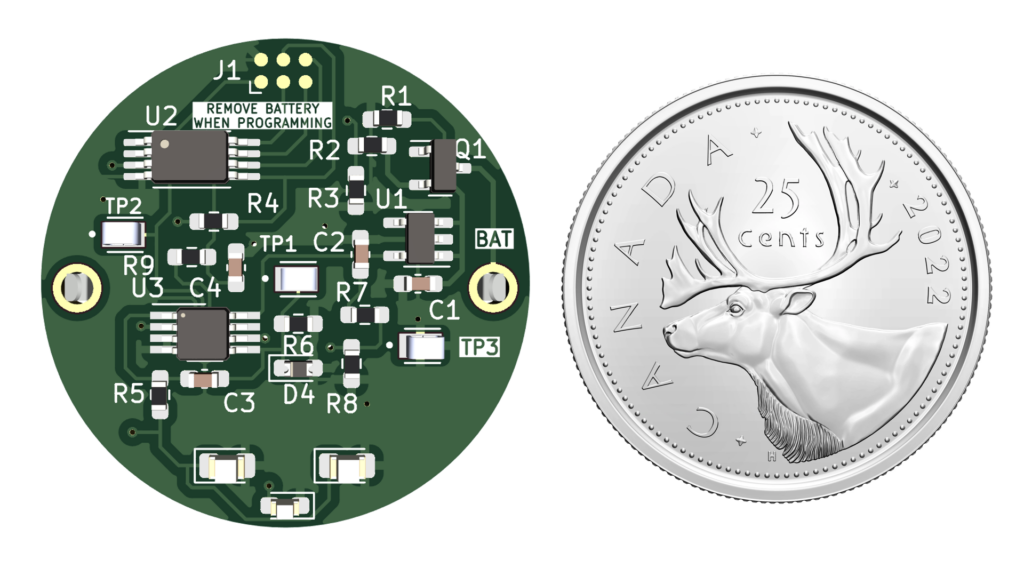
Description des principes utilisés
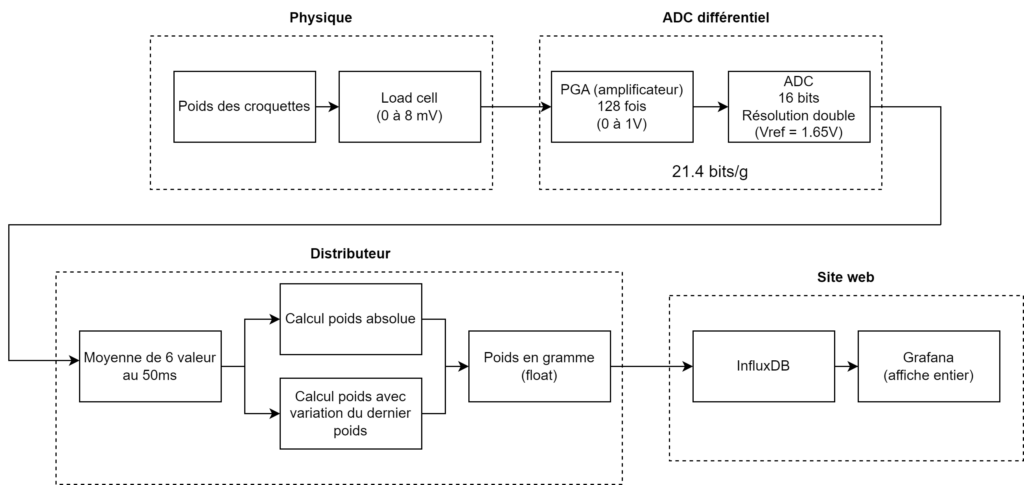
Balance
La balance permet de mesurer la quantité de croquettes dans le bol, facilitant ainsi la surveillance de l’appétit du chat via un site web dédié. Une cellule de charge (load cell) mesure le poids. Son signal analogique est amplifié et lu par un convertisseur analogique-numérique (ADC) différentiel.
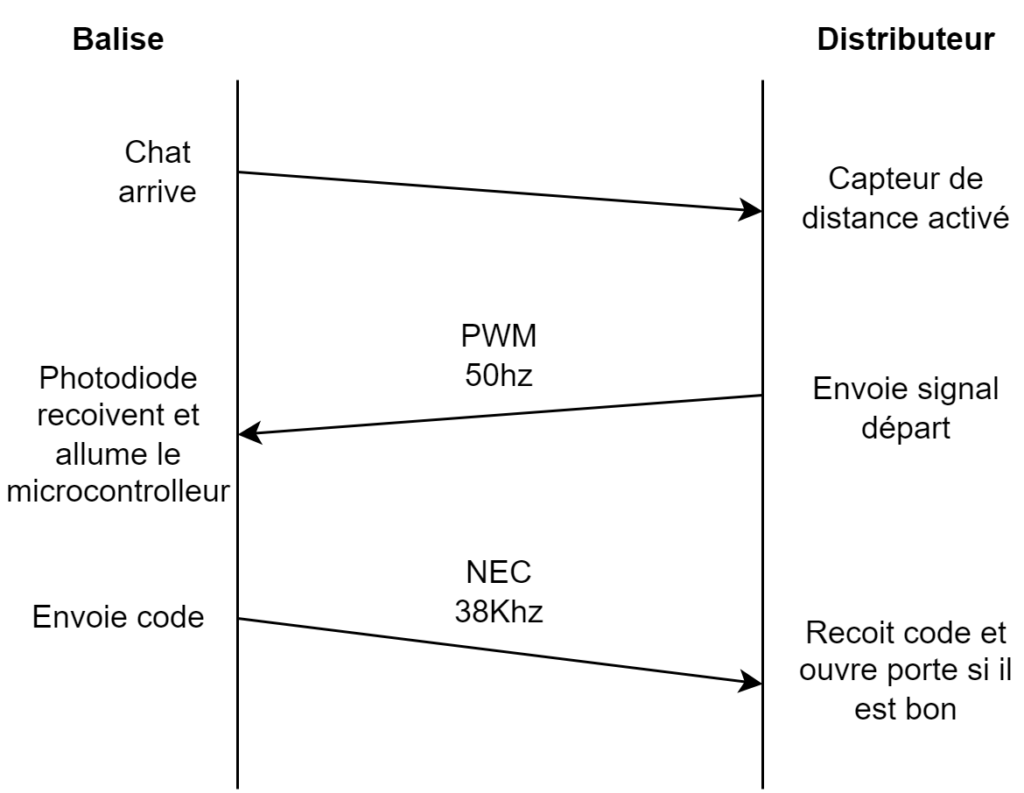
Communication infrarouge et balise
La communication infrarouge est utilisée entre la balise et le distributeur. Lorsque le capteur de distance détecte le chat, le distributeur envoie un signal infrarouge PWM à 50 Hz. Ce signal est reçu par les photodiodes de la balise, réveillant le microcontrôleur qui envoie ensuite son code NEC au distributeur, toujours via infrarouge. Si le distributeur reconnaît le code comme autorisé, il ouvre la porte du bol pour le chat.
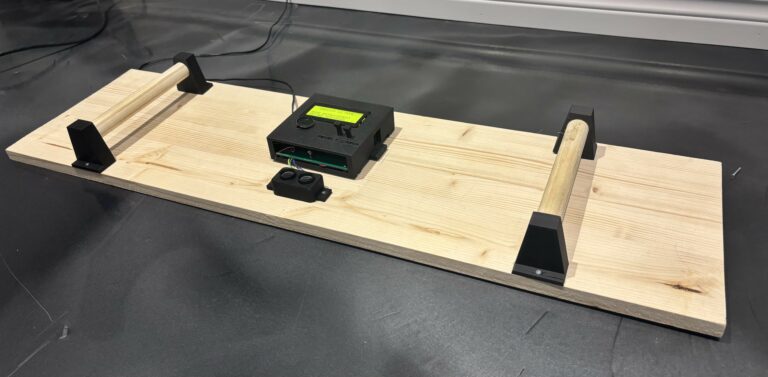
Mécanique de distribution des croquettes
Le moteur actionne un tourniquet avec des pales qui poussent les croquettes dans les compartiments du distributeur. Les croquettes sont acheminées vers la sortie et tombent dans le bol via une chute. Le moteur active puis désactive un interrupteur à chaque rotation complète, permettant au microcontrôleur de connaître précisément le déplacement d’un compartiment.
Alimentation
Le distributeur est alimenté par un bloc d’alimentation et des piles. Un circuit de commutation assure que seule une source d’alimentation alimente le distributeur, en priorisant le bloc d’alimentation. La transition entre les sources est automatique et imperceptible. En cas de coupure de courant, les piles prennent le relais. Lorsque le courant revient, le bloc d’alimentation reprend le contrôle. Les piles sont survoltées afin d’atteindre la tension nécessaire à l’aide d’un régulateur à découpage.

Description de l’interface utilisateur
L’interface utilisateur de ce projet comprend un écran avec un menu de navigation principal et quatre sous-menus : Accueil, Portions, Heure, et Actions. Le bouton d’alimentation permet de mettre en marche ou d’éteindre l’appareil, tandis que la DEL RGB (DEL multicolore) de statut offre des indications visuelles sur l’état de l’appareil. L’écran affiche le menu de navigation, que l’utilisateur peut explorer en utilisant le clavier à 5 touches, composé de quatre flèches directionnelles et d’un bouton de sélection. Le menu Accueil présente les informations importantes telles que l’état général et les notifications. Le sous-menu Portions permet de modifier la distribution des croquettes, ajustant les quantités selon les besoins. Le sous-menu Heure permet de configurer et modifier l’heure, ainsi que de planifier les repas. Enfin, le sous-menu Actions offre des options pour exécuter des actions manuelles comme l’ouverture de la porte, la distribution immédiate de croquettes, ou l’ajout de balises. De plus, un site web associé permet de consulter l’historique d’appétit du chat, et une page de connexion facilite la configuration des paramètres Wi-Fi.

Instruction d’utilisation
- Avant de commencer, assurez-vous d’insérer les piles dans le distributeur automatique et dans la balise au cou du chat.
- Branchez la distributrice.
- Configurez la distributrice une fois pour définir les heures de distribution des repas et les paramètres personnalisés.
- Une fois la configuration terminée, l’appareil est prêt à être utilisé. Il distribuera automatiquement les repas selon les horaires programmés, offrant ainsi une alimentation régulière et équilibrée à votre chat.
Lien vers GitHub
Pour le code, les schémas, les PCB et plus de photos :