Véhicule Téléguidé avec Caméra
Ce projet vise à intégrer un maximum de connaissances apprises dans le programme de Technologie des systèmes ordinés. Le résultat de ce projet est un véhicule pouvant être contrôlé dans un milieu intérieur. On y retrouve des applications dans la surveillance, l’exploration et le divertissement, offrant une possibilité intéressante pour la visualisation à distance.
Contexte et présentation générale du projet
Contexte de la réalisation du projet
Le projet du véhicule téléguidé avec caméra intégrée est né de la volonté de refaire, en une version améliorée, un projet de la première année: celui du robot. Celui-ci est un petit véhicule, visuellement peu intéressent et manquant de fonctionnalités.
Dans le but de boucler la boucle et de faire mieux que ce qui a été fait par le passé, il a été décidé de faire un véhicule téléguidé, comme en première année de la technique, mais en plus gros, plus abouti et plus impressionnant.
Présentation générale du véhicule téléguidé avec caméra intégrée
Le véhicule téléguidé se présente en deux parties : la manette servant à contrôler le véhicule et le véhicule lui-même.
Manette

La manette sert à diriger le véhicule. Le lien entre la manette et le véhicule est une communication RF. Avec la manette, il est possible de contrôler les mouvements du véhicule et faire tourner la caméra. La manette affiche, avec son écran, diverses informations sur le système lors de son fonctionnement.
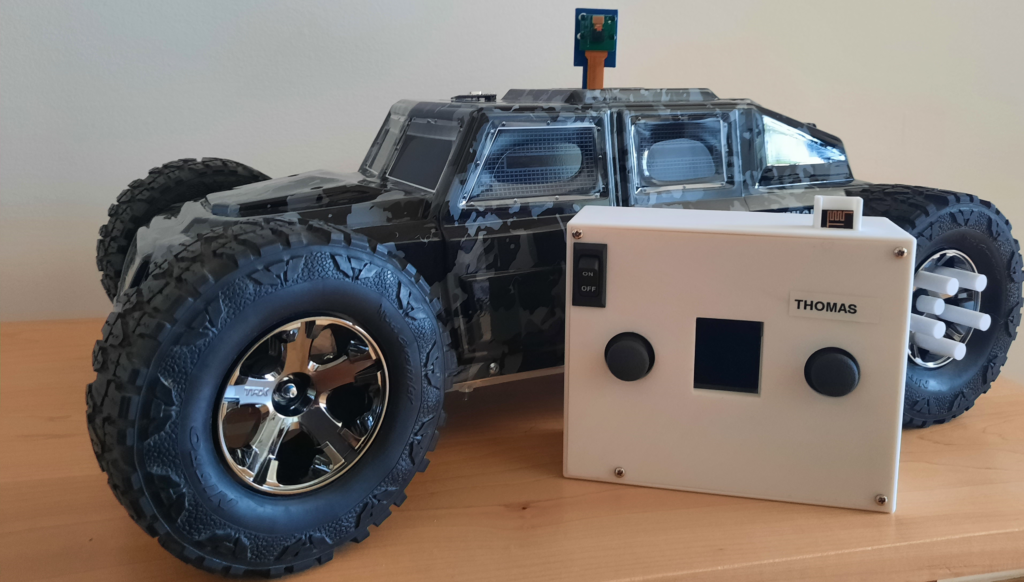
Véhicule

Le véhicule est la partie centrale du projet. Sous sa carrosserie à l’allure militaire, il y a le cerveau du véhicule qui est un Raspberry Pi, une caméra pour filmer en continu et 3 servomoteurs pour permettre au véhicule de se mouvoir et de faire tourner la caméra.
Photo des PCB
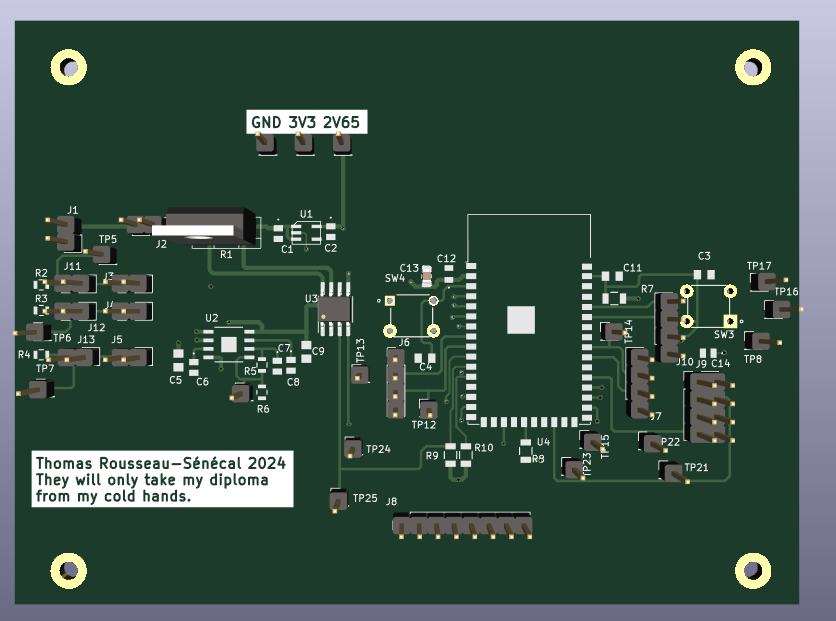
Voici les plaquettes de circuit imprimé qui sont dans le projet.
PCB Manette
PCB Véhicule
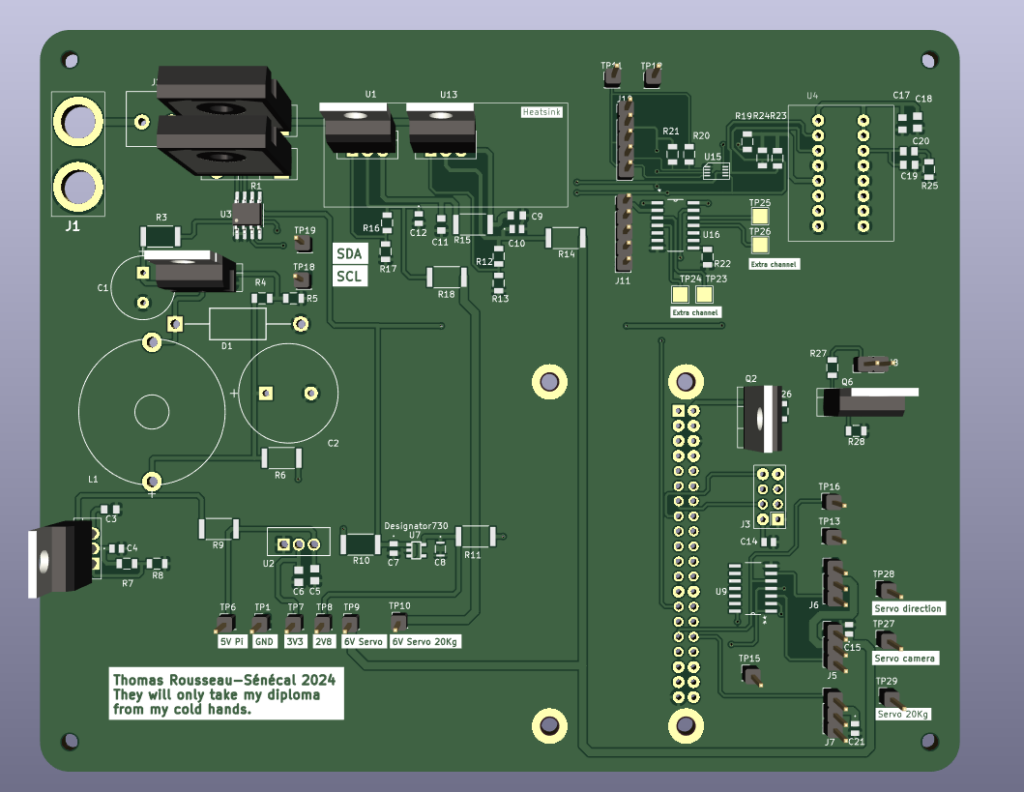
Schéma bloc de la manette et du véhicule
Schéma bloc Manette
Voici le schéma bloc de la manette :
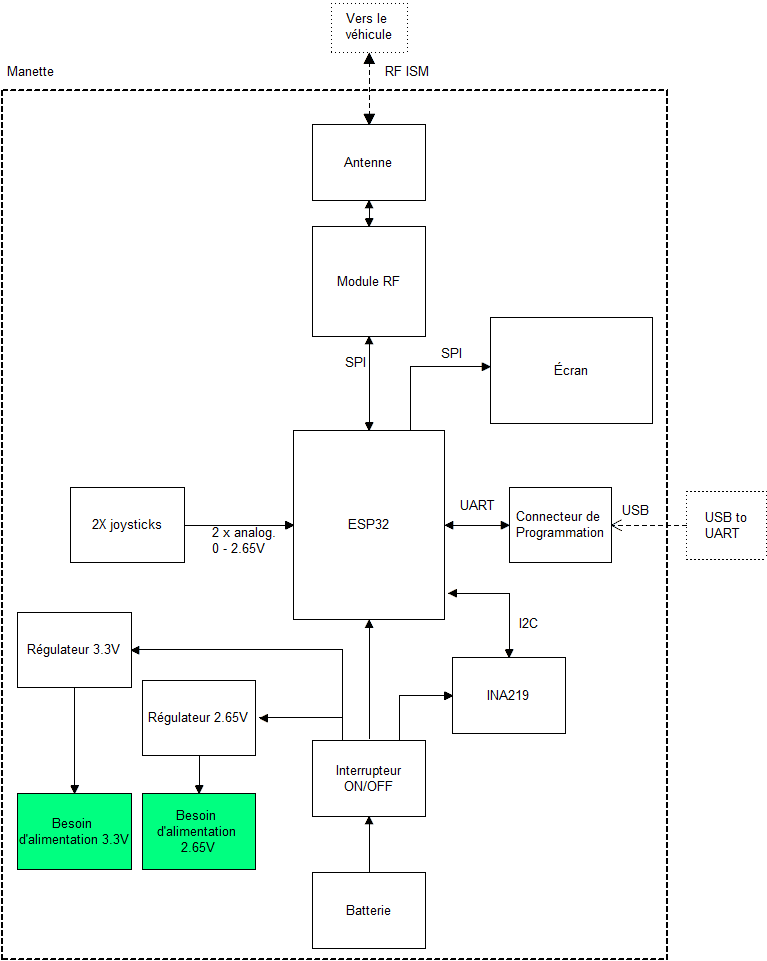
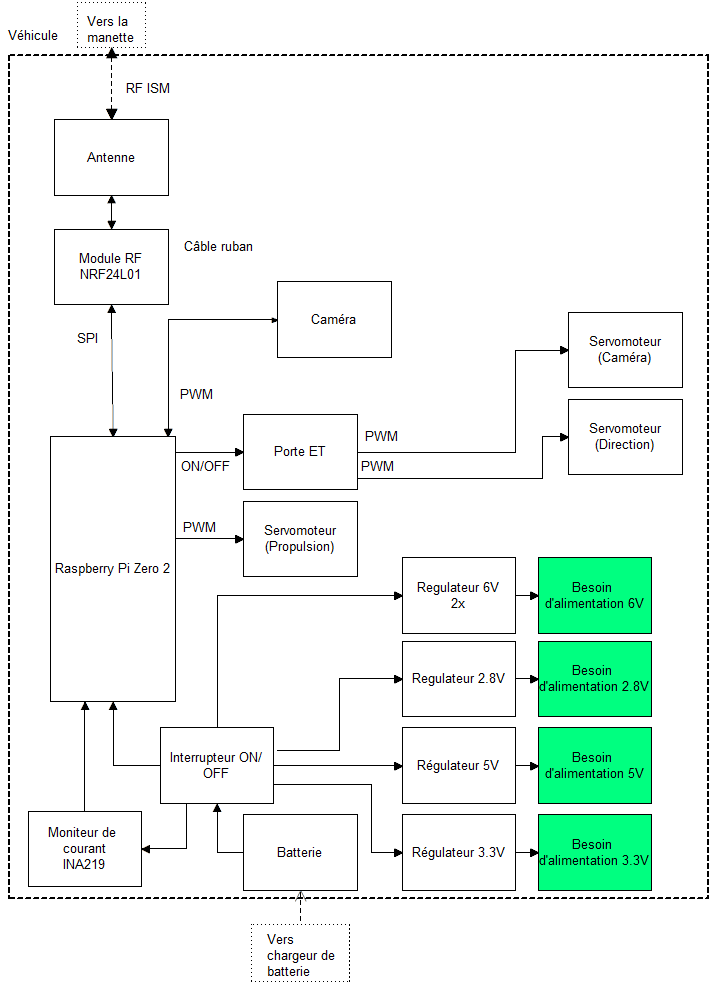
Schéma bloc : Véhicule
Voici le schéma bloc du véhicule :
Description des principes utilisés
Dans tout projet électronique, des principes technologiques sont utilisés. Ces principes servent de fondements pour la conception, la réalisation et l’optimisation des systèmes électroniques. La compréhension et l’application de ces principes sont essentielles pour garantir le bon fonctionnement et l’efficacité des dispositifs. Cette section a pour objectif de décrire les principaux concepts et méthodes qui sous-tendent le projet.
Principe #1 : Communication RF
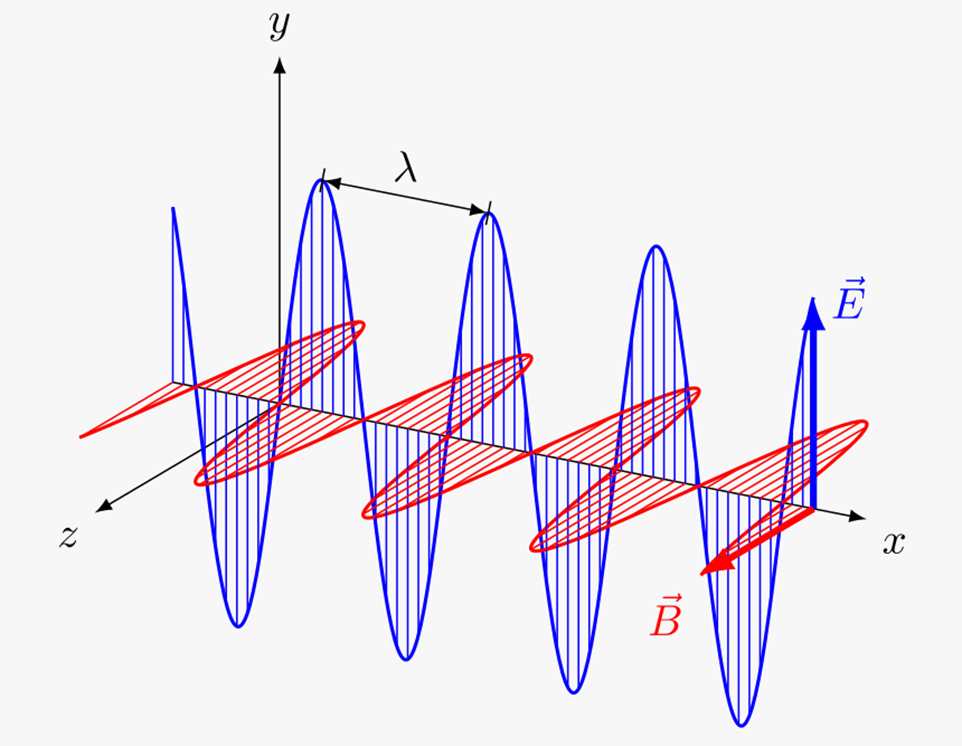
La communication entre la manette et le véhicule, se fait par ondes RF. Une onde RF (Radio Fréquence) est une onde électromagnétique. Une onde électromagnétique est une vibration qui transporte de l’énergie à travers l’espace et la matière. Elle est composée de champs électriques et magnétiques qui oscillent perpendiculairement l’un par rapport à l’autre et à la direction de propagation de l’onde. Les ondes électromagnétiques comprennent un large spectre, allant des ondes radio (comme les ondes RF), aux micro-ondes, à la lumière visible, aux rayons X et aux rayons gamma.
Pour établir une communication RF entre un émetteur et un récepteur, plusieurs aspects et spécifications des ondes RF et de la paire émetteur/récepteur utilisée doivent être respectés. Ces aspects sont, par exemples, la puissance d’émission, la fréquence de communication, le canal de communication, la détection d’erreurs de communication ou la quantité de données envoyées par seconde.
Pour l’utilisation de la communication RF dans le cadre du projet du véhicule téléguidé avec caméra intégrée, ce sont les émetteurs/récepteurs NRF24L01 qui sont utilisés. Pour établir la communication entre les deux appareils, ils sont configurés comme suit : fréquence de communication à 2,4Ghz (pour être dans la bande ISM (industrie, scientifique et médical) qui peut être utilisée sans acheter de licence); la puissance d’émission est fixée à 0 dBm; le CRC (Contrôle de redondance cyclique) servant à la détection des erreurs de communication a une longueur de 8 bits; les émetteurs/récepteurs NRF24L01 possèdent 125 canaux de communication et celui qui est utilisé est le 10ième; finalement, les données sont transmises à une vitesse de 250Kbits par seconde.
Principe #2 : Signaux PWM
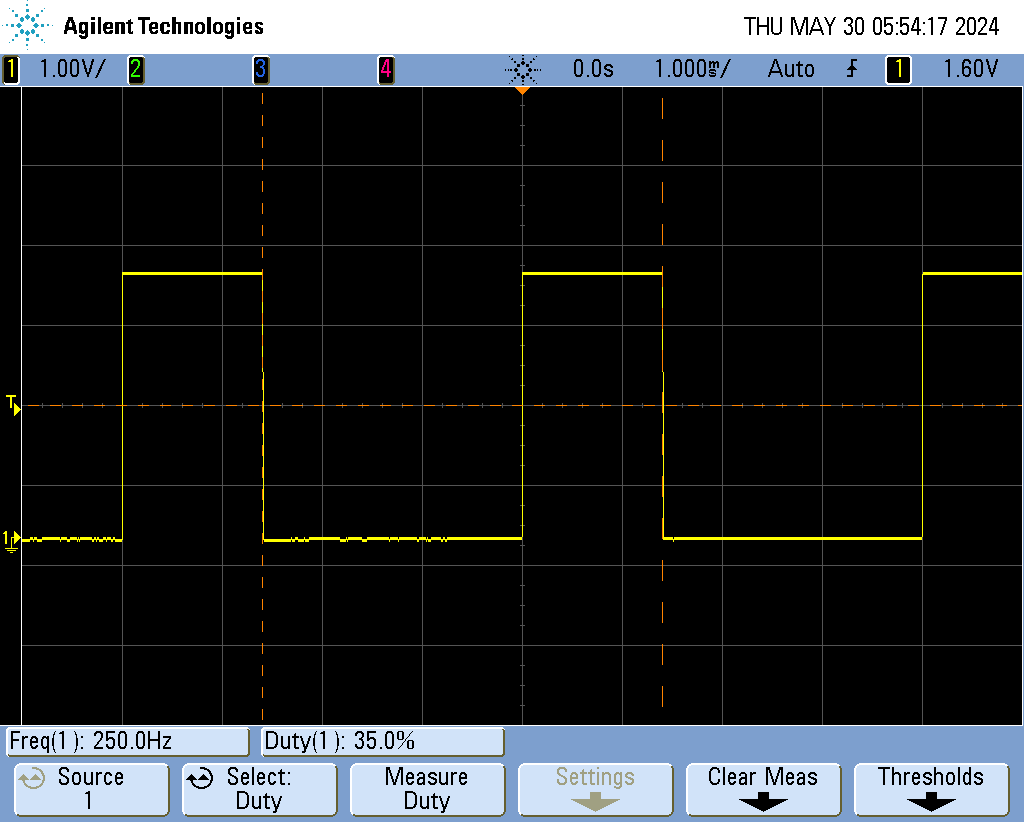
Un signal PWM, pour impulsion avec modulation, est un signal numérique (donc il ne peut avoir comme valeur que 0 ou 1). Le signal PWM a plusieurs caractéristiques qui le définissent. Il y a sa fréquence, qui fait référence au nombre de cycles complets d’impulsions générés par seconde. On ne peut pas choisir n’importe quelle fréquence pour un appareil. Lorsqu’un signal PWM est requis pour un appareil, le manufacturier précisera toujours la fréquence du signal PWM dans la documentation technique. Une autre caractéristique du signal PWM est son rapport cyclique (duty cycle). Le rapport cyclique s’exprime en pourcentage et il détermine pendant combien de temps le signal PWM sera au niveau. Un troisième paramètre important d’un signal PWM est l’amplitude en tension de celui-ci. Pour qu’un signal PWM puisse être utilisé par un appareil, tel qu’un servomoteur, il faut que la tension du signal respecte la plage de tension de l’appareil que l’on souhaite contrôler; une tension trop petite serait ignorée par l’appareil ou lui donnerait un comportement imprévisible, alors qu’une tension trop grande risque de briser l’appareil.
Dans le projet, trois signaux PWM distincts sont utilisés pour contrôler 3 servomoteurs différents. Cependant, un des servomoteurs a une rotation continue, alors que les deux autres peuvent pivoter selon un angle de 180°. Autrement dit, pour un servomoteur, un signal PWM peut servir à le contrôler en vitesse et direction ou peut servir à le contrôler en position.
Pour les deux signaux PWM qui sont utilisés pour les servomoteurs positionnels, ceux de la caméra et de la direction, ces signaux ont une fréquence de 250Hz, une amplitude maximale de 3,3V et a un rapport cyclique qui varie entre 10% et 55%.
Pour le signal PWM qui est utilisé pour le servomoteur continu, le signal a une fréquence de 250Hz, une amplitude maximale de 3,3V et un rapport cyclique qui varie entre 10% et 60%.
Principe #3 : Mesure du courant
Dans un circuit alimenté par batterie, il peut être nécessaire de connaitre le courant qui est consommé.
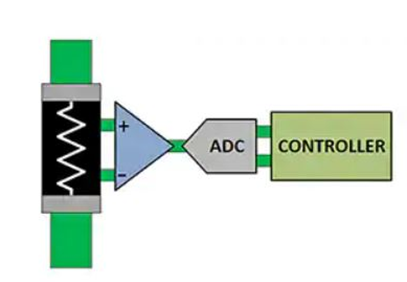
Pour mesurer le courant, on utilise une résistance de précision de faible valeur (pour ne pas affecter l’intensité du courant de manière significative) placée dans le trajet du courant. Cette résistance, généralement appelée shunt, développe une tension proportionnelle au courant qui la traverse. Étant donné que la tension de la shunt est très faible, il faut l’augmenter avec un amplificateur d’instrumentation avant d’être convertie par un convertisseur analogique-numérique (ADC). C’est avec le résultat de la conversion de l’ADC qu’on va pouvoir calculer le courant avec la loi d’Ohm
Voici le schéma général du circuit :
La résistance shunt doit être choisie en fonction des critères suivants : une faible résistance, une tolérance minime, une capacité de puissance élevée, un coefficient thermique faible et une faible inductance.
Pour mesurer le courant, il existe deux techniques différentes : la configuration bas potentiel et la configuration haut potentiel.
Dans la configuration bas potentiel, la charge est devant la résistance shunt et la résistance shunt est référencée à la masse. Cette configuration permet à l’amplificateur de détection du courant de jouer le rôle de composant basse tension, car la tension détectée est de l’ordre de seulement quelques millivolts au-dessus de la référence à la masse.
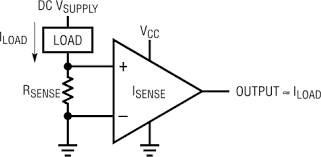
L’inconvénient de la mesure du courant bas potentiel est que la charge n’est plus référencée à la masse due à la position de la résistance shunt, ce qui a pour conséquence de placer la partie bas potentiel de la charge à plusieurs millivolts au-dessus de la masse.
Dans la configuration haut potentiel, la charge est après la résistance shunt.
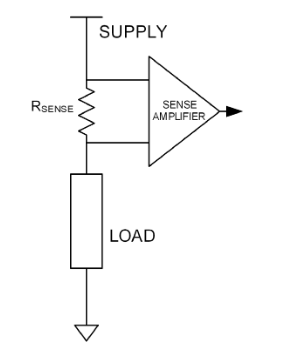
Cette configuration présente deux principaux avantages par rapport aux mesures bas potentiel. Premièrement, il est facile de détecter un court-circuit, car le court-circuit traversera la résistance shunt et développera une tension correspondant au court-circuit qui pourra être détecté par l’amplificateur d’instrumentation. Deuxièmement, comme cette technique de mesure n’est pas référencée à la masse, les tensions de masse différentielles développées par les forts courants n’auront pas d’incidence sur la mesure.
La technique de mesure du courant à haute tension a un inconvénient majeur. Cela nécessite que l’amplificateur de détection du courant puisse ignorer les grandes variations de la tension d’alimentation, car la faible tension mesurée à travers la résistance (shunt) est juste en dessous de la tension d’alimentation de la charge. Selon la conception du système, cette tension globale peut être assez élevée.
Dans la manette et le véhicule, la configuration qui est utilisée est la configuration haut potentiel.
Principe #4 : Convertisseur Analogique à Numérique
Un convertisseur analogique à numérique, ou ADC (pour Analog-to-Digital Converter), est un dispositif qui transforme les signaux analogiques en signaux numériques. Les signaux analogiques sont des signaux continus, comme la voix humaine ou la température mesurée par un capteur, qui peuvent varier de manière fluide et sans interruption. En revanche, les signaux numériques sont constitués de valeurs discrètes, souvent représentées par des chiffres binaires (0 et 1), que les ordinateurs peuvent facilement traiter et emmagasiner.
Pour convertir un signal analogique en signal numérique, l’ADC a besoin de 2 étapes : l’échantillonnage et la quantification.
Pour l’étape de l’échantillonnage, l’ADC prélève des échantillons du signal analogique à intervalles réguliers. Cela signifie qu’il mesure la valeur du signal à des moments précis. La fréquence à laquelle ces échantillons sont prélevés est appelée fréquence d’échantillonnage. Une fréquence d’échantillonnage plus élevée signifie que le signal est mesuré plus souvent, ce qui permet une représentation numérique plus précise du signal analogique original.
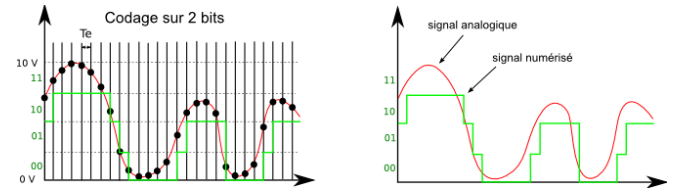
L’image ci-dessous présente un signal analogique qui se fait échantillonner.
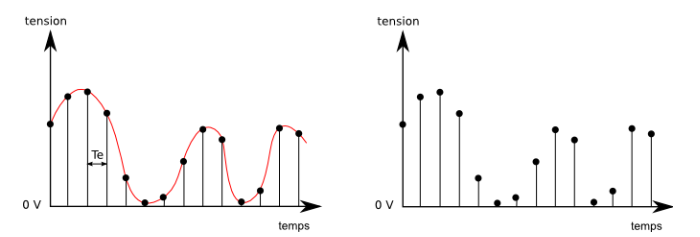
Pour l’étape de la quantification, l’ADC doit attribuer une valeur numérique à chaque échantillon. Le signal analogique peut prendre une infinité de valeurs, mais l’ADC doit le convertir en un nombre limité de valeurs discrètes. Cela se fait en divisant la plage possible des valeurs du signal en un certain nombre de niveaux ou « pas ». Par exemple, si l’ADC peut représenter des valeurs sur une échelle de 0 à 255 (ce qui est courant pour un ADC à 8 bits), chaque échantillon du signal analogique sera arrondi à la valeur numérique la plus proche parmi ces 256 niveaux.
Chaque niveau de quantification est ensuite converti en un nombre binaire. Par exemple, si un échantillon est arrondi à 128 sur une échelle de 0 à 255, cela pourrait être représenté en binaire comme 10000000. C’est cette donnée que l’on va pouvoir utiliser dans un algorithme pour travailler avec ou pour la stocker dans une base de données.
L’image ci-dessous montre les échantillons qui sont quantifiés. À la fin du processus, on obtient un signal numérique plus ou moins similaire à notre onde analogique.
Le projet du véhicule téléguidé avec caméra intégrée utilise 3 ADC. Les joysticks permettant de faire avancer et pivoter le véhicule et de faire tourner la caméra envoient une tension analogique au microcontrôleur. Pour pouvoir utiliser les informations envoyées par les joysticks, 3 des ADC internes au microcontrôleur sont utilisées.
Description de l’interface utilisateur

Pour le véhicule téléguidé avec caméra intégrée, la quasi-totalité de l’interface utilisateur est sur la manette.
Interface manette
Comme montré sur l’image ci-dessus, la manette comporte deux joysticks, un écran et un interrupteur ON/OFF.
Le joystick de gauche permet de faire avancer et tourner le véhicule. Il est possible de faire avancer et tourner le véhicule en même temps. Lorsqu’on pousse le joystick vers l’avant, le véhicule avance; lorsque le joystick est tiré vers l’arrière, le véhicule recule et lorsque le joystick est incliné à gauche ou à droite, le véhicule va dans la direction de l’inclinaison du joystick. Le joystick à droite de l’écran sert à faire pivoter la caméra de gauche à droite. La caméra va pivoter dans la direction de l’inclinaison du joystick, vers la gauche ou la droite. Pour le véhicule et la caméra, leur mouvement sera proportionnel au mouvement du joystick attitré.
L’écran affiche deux informations. Il affiche en pourcentage l’état de la batterie pour la manette et pour le véhicule. Lorsqu’une ou les deux batteries tombent à 5% ou moins, l’écran affiche un message d’alarme spécifiant que la batterie qui est sous 5% doit être rechargée.
Interface véhicule
L’interface du véhicule se résume simplement à l’interrupteur ON/OFF qui se trouve sous le véhicule à l’avant-gauche.
Instruction d’utilisation
Pour une utilisation de base du véhicule, suivez cette procédure :
- Activer la manette.
- Activer le véhicule.
- Attendre 30 secondes le véhicule ait fait son démarrage. Le bruit des moteurs indique la fin de cette étape.
- Le véhicule est prêt à rouler.
Pour utiliser la caméra, il faut un téléphone cellulaire ou ordinateur ayant une application permettant de visualiser un flux vidéo par Wi-Fi, (par exemple, VLC). Pour utiliser la caméra, suivez la procédure ci-dessous :
- Connecter un téléphone cellulaire ou un ordinateur au même réseau Wi-Fi que celui du véhicule.
- Ouvrir l’application de visualisation de flux vidéo.
- Dans votre application, opter pour l’option : ouvrir un flux réseau.
- Dans le champ approprié de votre application, inscrire les informations suivantes : http://*******:8160.
- Remplacer les étoiles par l’adresse IP du véhicule.
- Faire démarrer le flux vidéo sur votre application.
Instruction d’assemblage
Manette
La manette n’a pas besoin d’être assemblée, puisque celle-ci est fournie à l’utilisateur déjà assemblée.
Pour enlever la batterie de la manette pour la recharger, suivez la procédure ci-dessous :
- S’assurer que l’interrupteur ON/OFF est bel et bien en position OFF.
- Dévisser les quatre vis du couvercle.
- En tenant les joysticks, soulever délicatement le couvercle en le faisant basculer vers l’arrière
Véhicule
Assemblage du véhicule
Pour assembler le véhicule, suivre la procédure ci-dessous :
- Mettre l’interrupteur ON/OFF en position OFF.
- Mettre la batterie dans son support.
- Brancher la batterie dans le connecteur jaune en haut à gauche du PCB.
- Brancher le module RF selon l’image ci-dessous.
- Placer le support de la caméra sur le servomoteur central du véhicule.
- À l’arrière de l’ordinateur sur plaquette, défaire délicatement le connecteur, à l’arrière de l’ordinateur sur plaquette, en tirant sur les côtés du connecteur.
- Placer délicatement le câble de la caméra à l’intérieur du connecteur.
- Refermer le connecteur en appuyant dessus délicatement.
- Tenir le module RF dans vos mains, tout en installant la carrosserie. Le module RF doit sortir de la carrosserie par l’ouverture prévu pour le module RF.
- Visser les quatre vis de la carrosserie sur les morceaux de bois des deux côtés du véhicule.
Voici comment brancher le module RF :
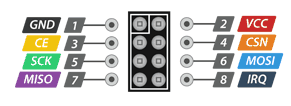


Il n’est pas nécessaire de brancher la broche IRQ.
Pour enlever la batterie du véhicule pour la recharger, suivez la procédure ci-dessous :
- S’assurer que l’interrupteur ON/OFF est bel et bien en position OFF.
- Dévissez les quatre vis de la carrosserie.
- En tenant le module RF incliné, enlevez la carrosserie.
- Débrancher la batterie du connecteur jaune en haut à gauche du PCB
- Enlever la batterie de son support.
Pour retirer la caméra du véhicule, suivez la procédure ci-dessous :
- S’assurer que l’interrupteur ON/OFF est bel et bien en position OFF.
- Dévisser les quatre vis de la carrosserie.
- En tenant le module RF incliné, enlever la carrosserie.
- Défaire délicatement le connecteur, à l’arrière de l’ordinateur sur plaquette, en tirant sur les côtés du connecteur.
- Retirer le câble de la caméra du connecteur.
- Retirer le support de la caméra du servomoteur.
Liens vers les schémas électroniques, les codes sources et les informations de la mécanique du projet
Caractéristiques de l’appareil
Caractéristiques Mécaniques et Structurelles
Manette
- Imprimée en 3D avec du PLA
- Dimension (cm) : largueurxlongueurxhauteur
- Poids (kg) :
- Forme générale : Carrée
Véhicule
- Matériaux : Bois, laiton, plexiglas, aluminium, impression 3D au PLA
- Dimension (cm) : largueurxlongueurxhauteur
- Poids (kg) : 2,5
- Forme générale : Rectangulaire
Caractéristiques Électroniques
Manette
- Écran LCD SPI de résolution : 128×160
- 2 Joysticks double axes analogique
- Module SPI de communication RF
- Portée de communication RF : 30 mètres
- Interrupteur ON/OFF
- Moniteur de courant I2C
- Microcontrôleurs série ESP32
- Système d’alimentation
- batterie 3,7V
- régulateur 3,3V
- régulateur 2,65V
Véhicule
- Interrupteur ON/OFF
- Système d’alimentation :
- batterie 7,4V
- 2 régulateurs 6V
- régulateur 5V
- Module SPI de communication RF
- Portée de communication RF : 30 mètres
- Ordinateur sur plaquette série Raspberry pi
- Portes AND
- 3 Servomoteurs
- 2 Servomoteurs positionnels
- 1 Servomoteur continu
- Caméra
- Résolution : 2592 × 1944 pixels
- Angle de vue : 54°
- Transmission des images de la caméra par Wi-Fi
- Latence : 6 secondes en moyenne