Contrôleur de ventilateur
Ce projet consiste à contrôler un moteur à courant continu bidirectionnel (capable de tourner dans les deux sens) à l’aide d’un potentiomètre pour ajuster la vitesse et d’un bouton pour inverser le sens de rotation.
Fonctionnement du projet
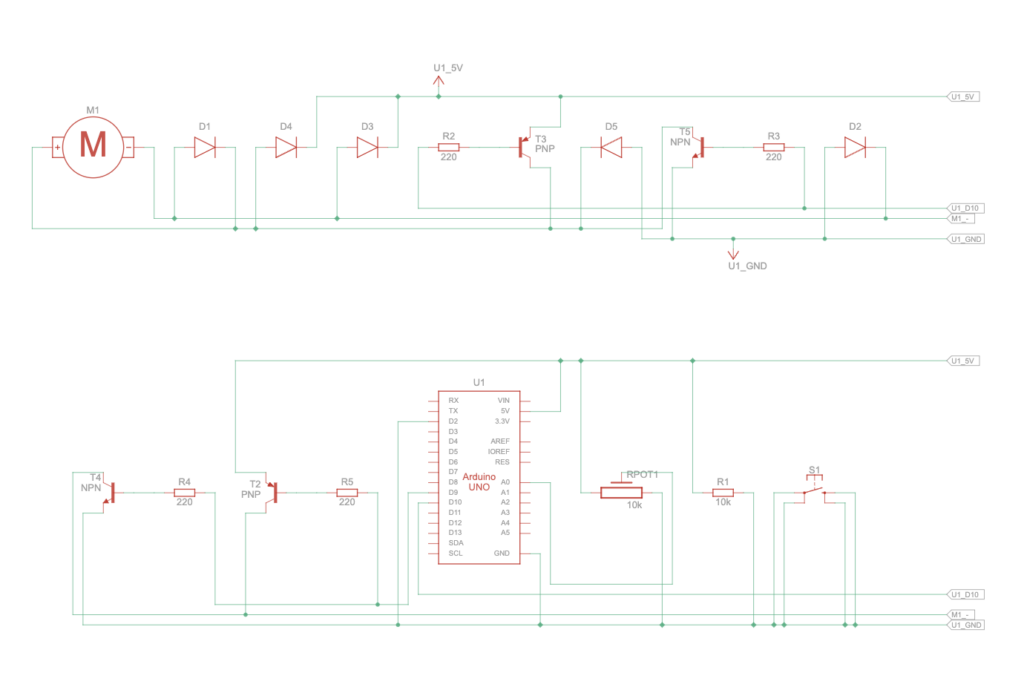
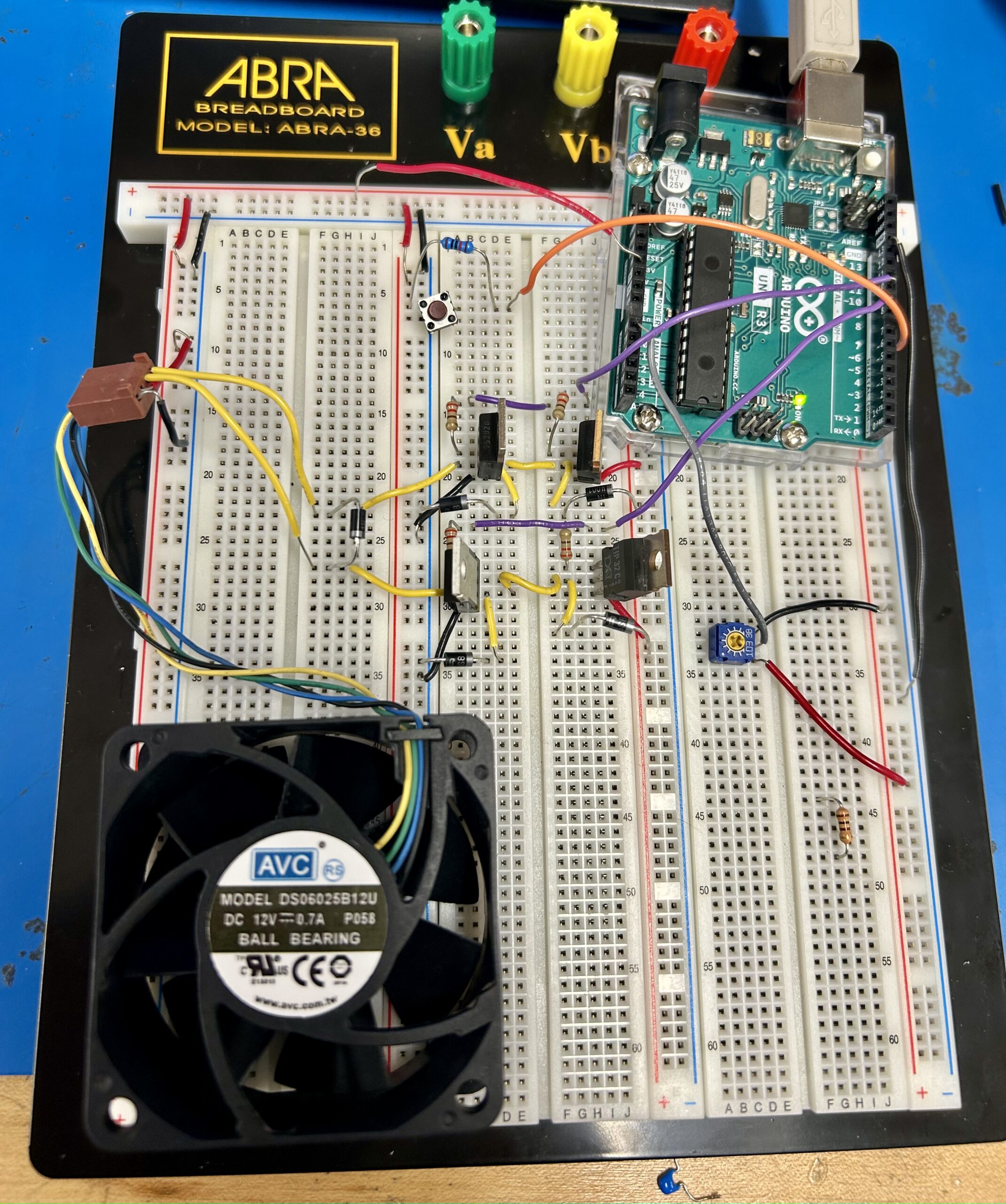
Le potentiomètre, connecté à l’entrée analogique A0, ajuste la vitesse en générant une valeur de puissance (0 à 255) proportionnelle à sa position, qui est ensuite appliquée au moteur via les broches 9 ou 10. Le bouton, connecté à la broche 2, détermine le sens de rotation : si le bouton n’est pas appuyé, le moteur tourne dans le sens horaire en activant 9 avec le signal de puissance et en maintenant 10 à un niveau bas ; si le bouton est appuyé, le moteur tourne en sens anti-horaire en inversant cette logique (La puissance sur 10 et 9 à un niveau bas).
Schémas électroniques