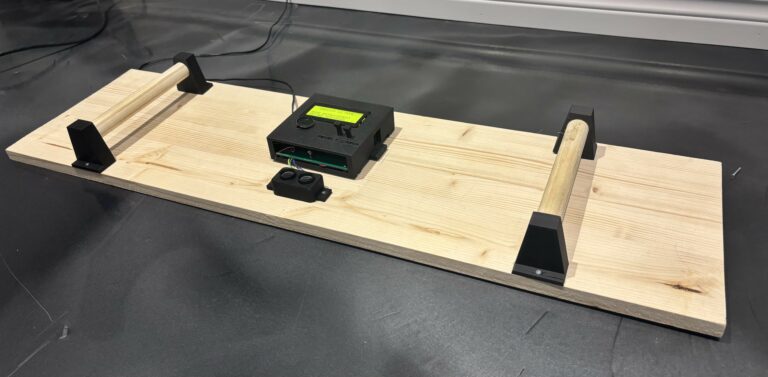
Robot MC1 & Manette Bluetooth
Par Cédric Frenette et Mihai Stinga

À travers cette page, vous allez découvrir un projet extrêmement captivant comportant son lot de programmation, de mécanique et encore d’électronique. Découvrez le Robot MC1 à travers tout son processus de conception, que cela soit de la conception 3D, à la conception de nos schémas électriques ou encore tous les principes technologiques utilisés.
Vous aimez tout ce qui tourne autour de l’automatisation et de la robotique? Et bien cet article est pour vous. Dans cet article, nous allons vous présenter les étapes primordiales que nous avons traversées pour arriver à créer un bras motorisé contrôlé par une manette, le tout avec une connexion sans fil ! Passionné d’électronique, mais intrigué par la mécanique? Suivez notre cheminement, en passant du cahier des charges initial au Robot MC1 conçu pour effectuer des tâches répétitives à la place d’un être humain.
Architecture
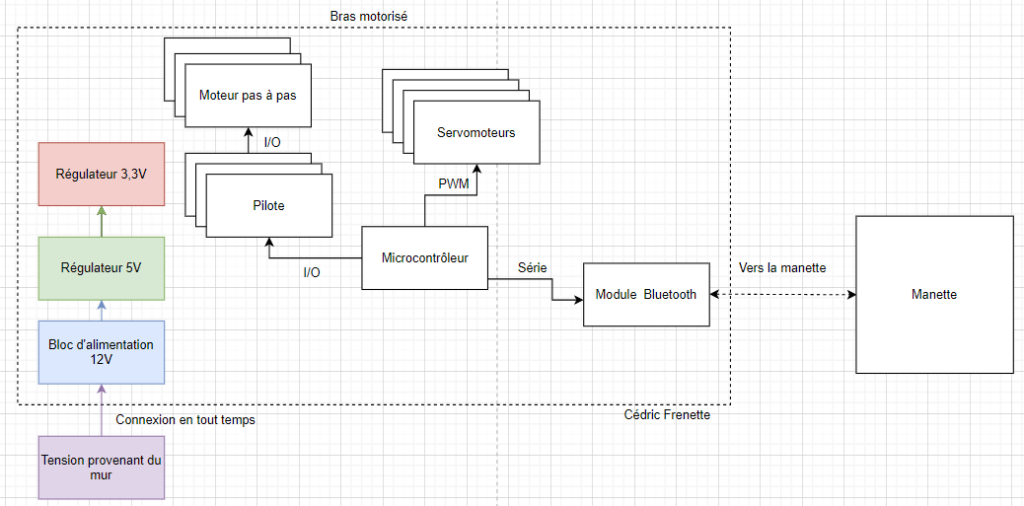
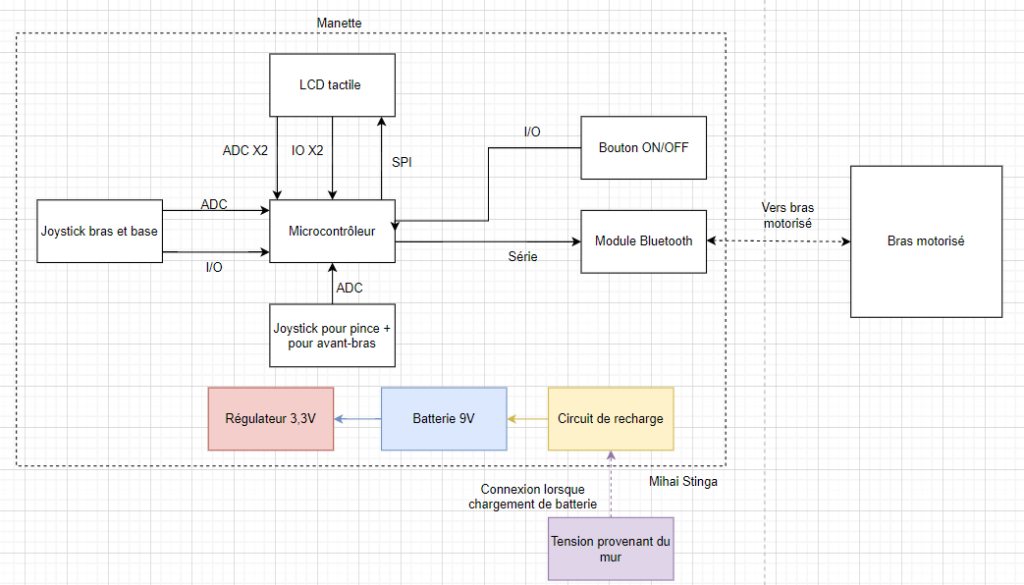
Voici tout d’abord les schémas blocs de du projet qui vous permettront de mieux comprendre chacune des parties de notre projet.
Bras motorisé:
Manette:
Principes utilisés
Voici maintenant les principes que nous avons utilisés dans notre projet.
Bluetooth
Le premier concept dont nous allons vous parler est le Bluetooth. Le Bluetooth est simplement un protocole de communication radiofréquence. C’est entièrement grâce à lui que nous avons réussi à effectuer un lien sans fil entre notre manette et le bras.
Pour ce faire, nous avons créé nous même la trame de données qui est envoyée à partir de la manette et qui est reçue par le bras. L’information est ensuite décodée et le traitement des données peut alors être effectué.
Ce protocole est un protocole très fiable et aussi très puissant sur de courtes distances. Par exemple, nous avons été capables de contrôler le robot jusqu’à plus ou moins 30 mètres ce qui dépasse énormément nos attentes.

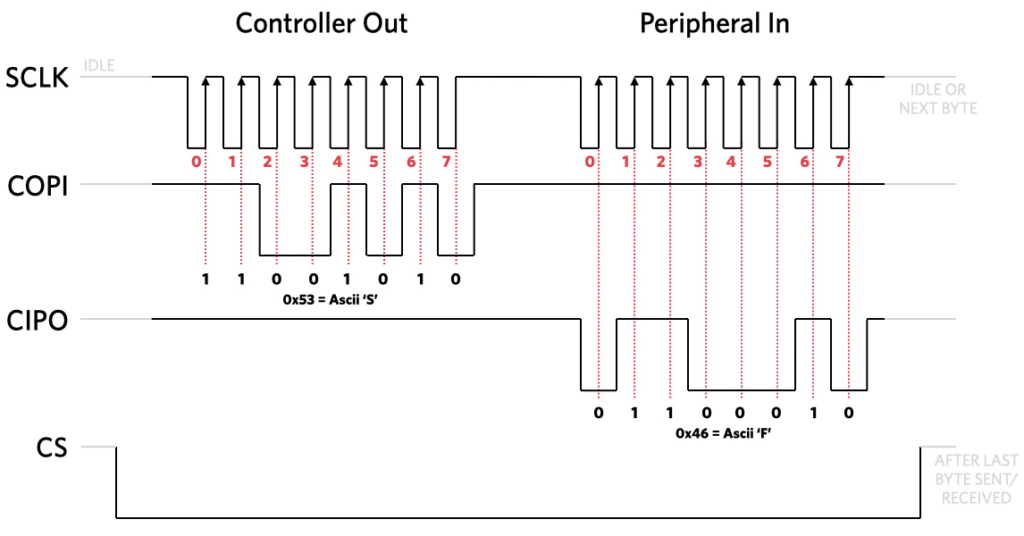
SPI
Le SPI est un autre protocole de communication, mais celui-ci est filaire. Il comporte obligatoirement trois fils, un pour l’horloge, un pour la communication vers l’esclave et un pour la communication vers le maître. Ensuite, le nombre de fils variera selon le nombre de capteurs ou composantes connectées sur le bus SPI.
Ce protocole nous a permis de faire la communication entre notre microcontrôleur et l’écran tactile.
Contrôle d’un moteur pas-à-pas à l’aide d’un pilote
Il faut savoir que dans un projet électronique, il y a obligatoirement un microcontrôleur qui s’occupe de gérer tous les périphériques autour de lui. En gros c’est le coeur même du projet.
Cependant, les microcontrôleurs ne peuvent généralement pas fournir une très grande quantité de courant. C’est donc à ce moment qu’il est nécessaire de se tourner vers d’autres alternatives.
Dans notre cas, nous avions besoin de quelques choses qu’il allait avoir deux alimentations séparées pour permettre de ne pas brûler le microcontrôleur lorsque nous allions bouger nos moteurs. C’est donc pourquoi nous avons choisi de faire confiance à un pilote. Le pilote à concrètement deux alimentations. Une lui permettant d’effectuer les contrôles des moteurs pas à pas et une alimentant les moteurs séparément.
Ce petit pilote s’assure donc seulement de faire varier ses quatre broches de sortie connectées au moteur de façon à le faire tourner dans l’orientation que l’on lui donne et à la vitesse que l’on lui donne.
Interface de l’écran
Comme nous l’avons mentionné un peu plus haut, nous avons un écran tactile. Cet écran tactile est un écran tactile résistif.
Un écran tactile résistif fonctionne grâce à deux couches conductrices qui se touchent lorsqu’on exerce une pression. Il détecte la position du toucher en mesurant la résistance électrique à cet endroit.
Ces écrans réagissent à n’importe quel objet appuyant sur la surface, comme un doigt ou un stylet. Ils sont moins chers à produire, précis et résistants à la saleté et aux liquides. Cependant, ils peuvent être moins clairs, moins réactifs au toucher léger, et leur surface en plastique peut s’user avec le temps.
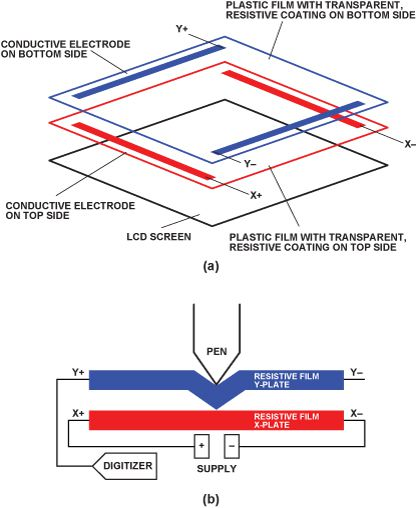
Schéma électrique
Voici le schéma électrique de la boîte de contrôle du bras motorisé:
Voici le schéma électrique de la manette sans fil:
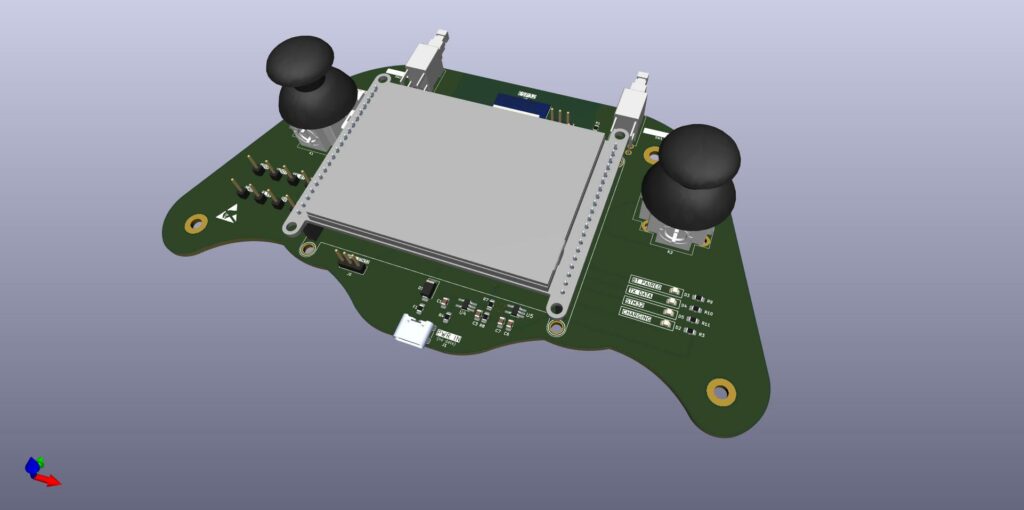
Carte électronique
Voici les cartes électronique que nous avons réalisé en 3D en commençant par celui du bras motorisé:

Voici la carte électronique de la manette:
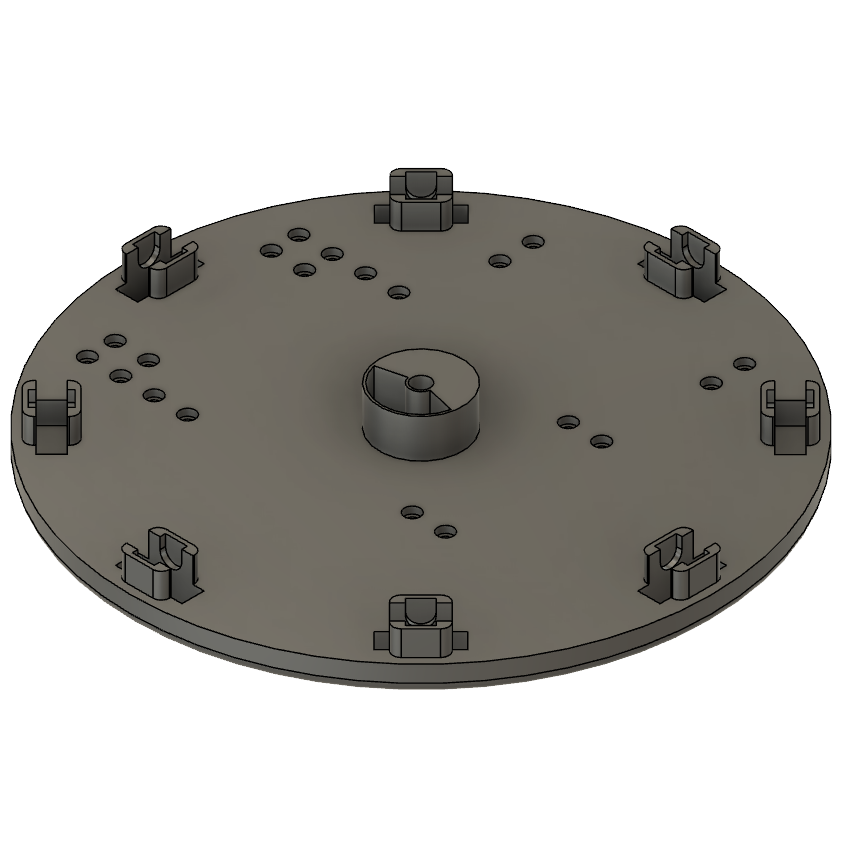
Conception mécanique
Voici des photos de toutes les pièces, que nous avons conçues sur le logiciel Fusion 360, qui sont nécessaires au fonctionnement de notre projet.
La base du bras:

Le disque tournant sur la base:
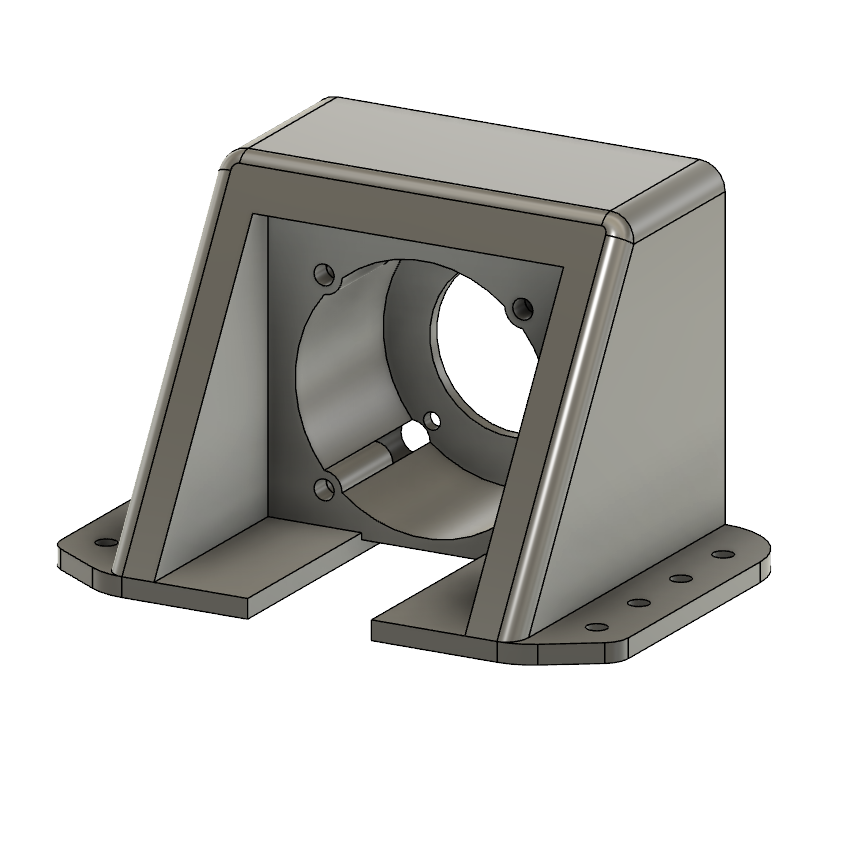
Le support pour le moteur pas à pas sur la base:
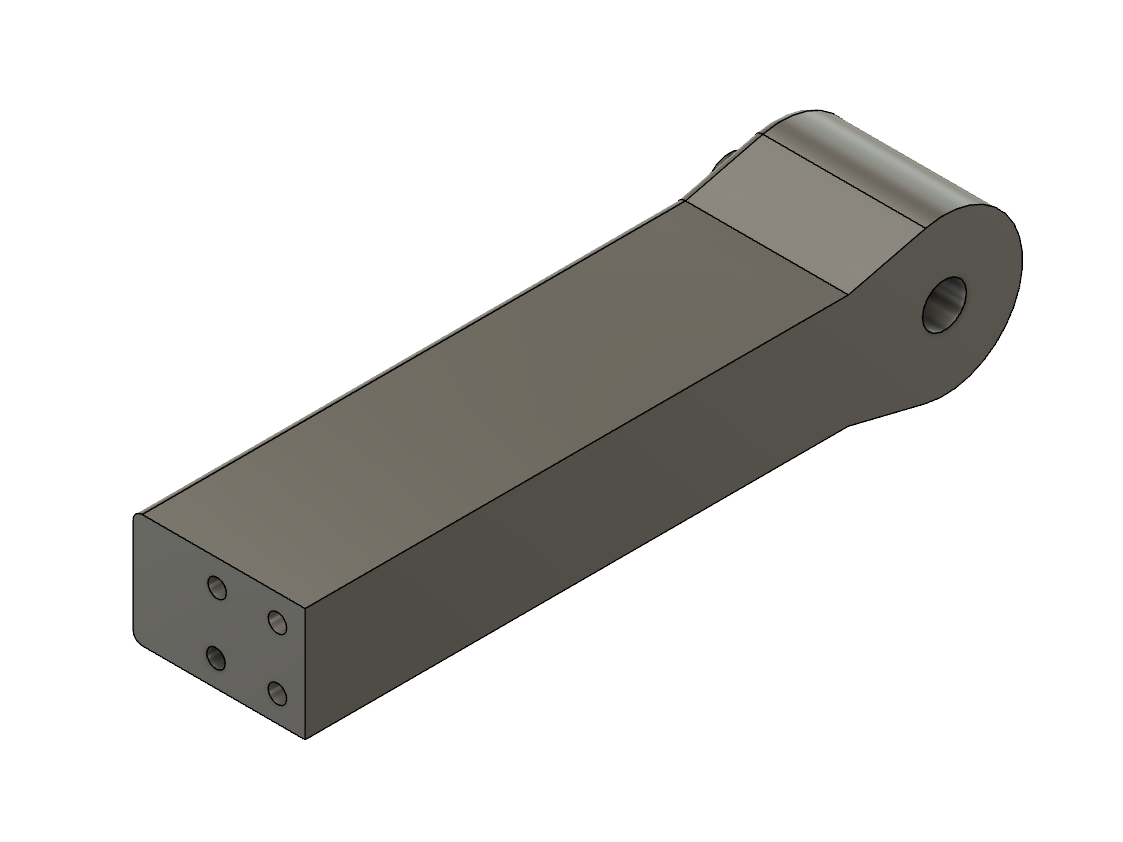
La partie reliant le moteur pas à pas au premier servomoteur:
La pièce espaçant la gearbox de l’intérieur de la base:
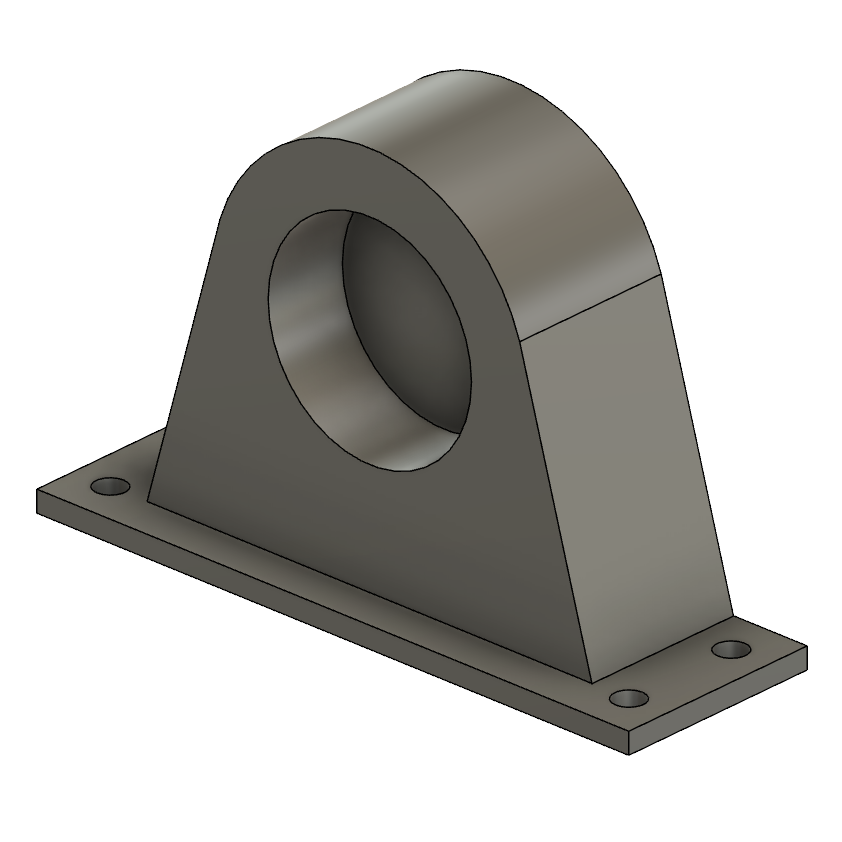
La pièce soutenant l’autre côté du bras:
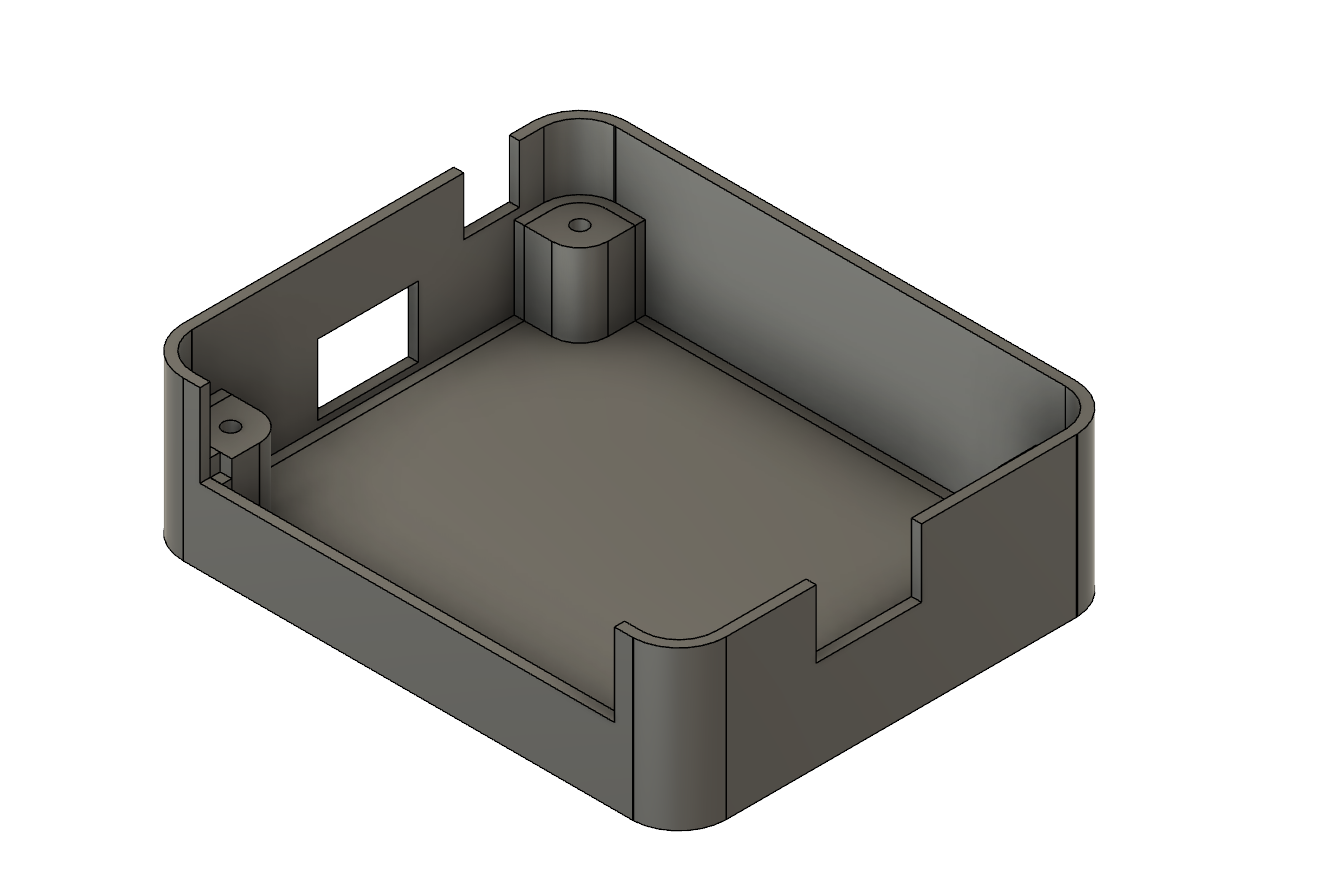
Le boitier de la manette:

Le boitier du contrôleur du bras:
Documents et liens
Voici le lien vers la partie programmation de notre projet:
https://github.com/Cedou32/Robot_MC1
Informations sur nous
Pour les informations de Cédric Frenette:
https://www.linkedin.com/in/cedric-frenette-596515289
Pour les informations de Mihai Stinga: