Contrôle d’un robot via un lien VHF/UHF
Contrôlez un véhicule à distance grâce à une télécommande RF à 433 MHz. Ce projet met en œuvre une communication sans fil fiable basée sur une modulation ASK, reliant un encodeur HT12E à un décodeur HT12D pour transmettre les commandes en temps réel.

Matériel Utilisé
- Breadboard
- HT12D(décodeur) & HT12E (encodeur)
- L293D (drivers)
- Module FS1000A TX & RX-470 RF
- Piles rechargeables 3.7Volts
- Batterie LiPo 7,4 V 450 mAh (rechargeables)
- Moteur à engrenages CC 130 (moteur TT)
- Antennes à ressort hélicoïdal 433 MHz
- L7805 Régulateur 5V
- Imprimante 3D
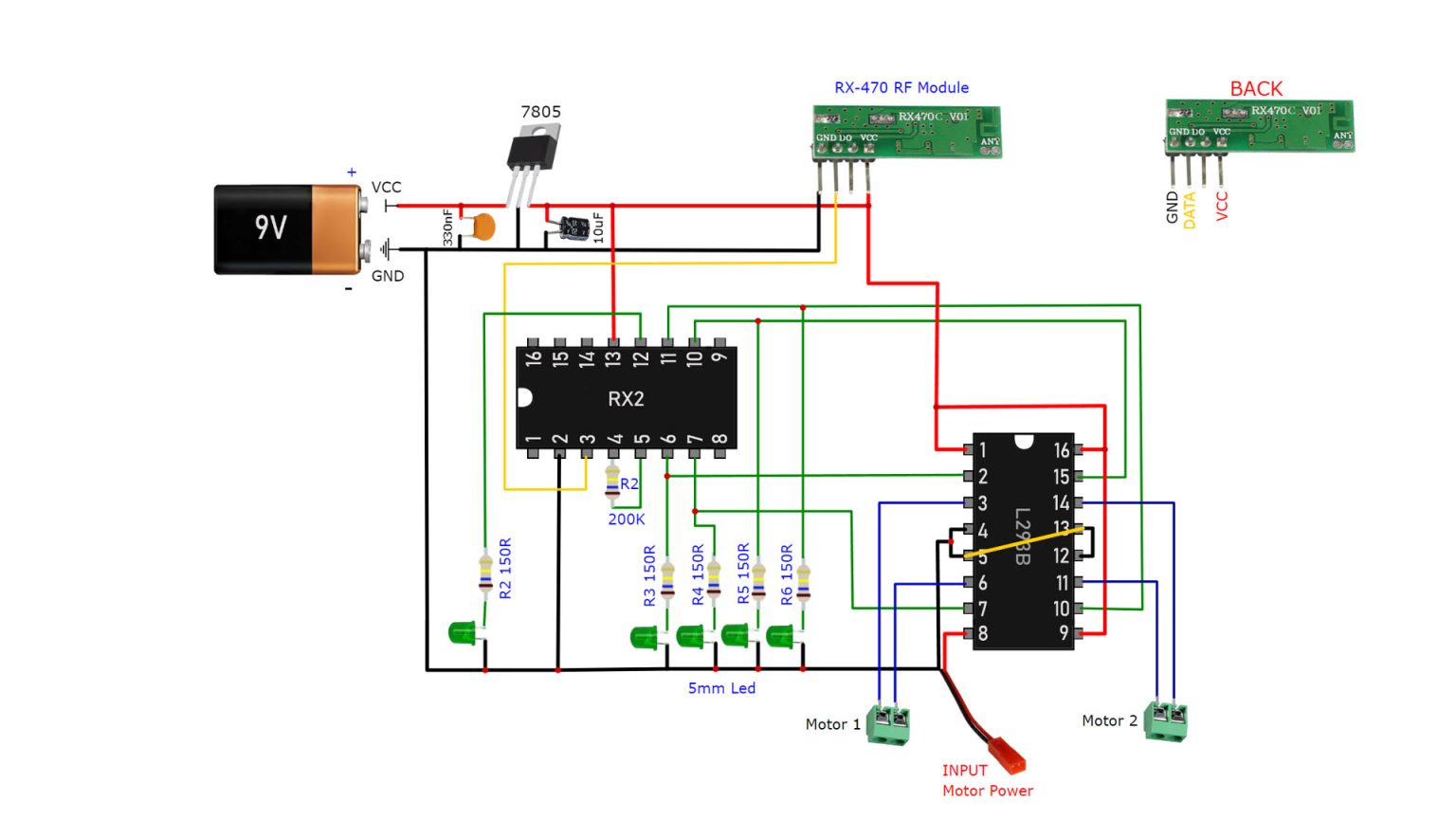
Schéma
Voici le schéma de communication entre l’encodeur de la télécommande et le décodeur de la voiture:
Le système repose donc sur deux circuits électrique principaux :
Circuit émetteur
Il utilise un encodeur HT12E et un module RF FS1000A
La télécommande est équipée de quatre boutons permettant de contrôler les déplacements du robot selon différentes combinaisons avec des variations de vitesse et d’intensité de rotation des roues. Le tableau ci-dessous illustre les différentes combinaisons des boutons de la télécommande ainsi que leurs effets
|
Rouge Droit |
Rouge Gauche |
Vert Droit |
Vert Gauche |
Action |
Feux de signalisation activé |
|
0 |
0 |
0 |
1 |
Virage léger à gauche |
Avant gauche |
|
0 |
0 |
1 |
0 |
Virage léger à droite |
Avant droite |
|
0 |
0 |
1 |
1 |
Avance |
Avant gauche & droite |
|
0 |
1 |
0 |
1 |
Virage serré à gauche |
Avant gauche & arrière droite |
|
1 |
0 |
1 |
0 |
Virage serré à droite |
Avant droite & arrière gauche |
|
1 |
1 |
0 |
0 |
Recule |
Arrière gauche & droite |
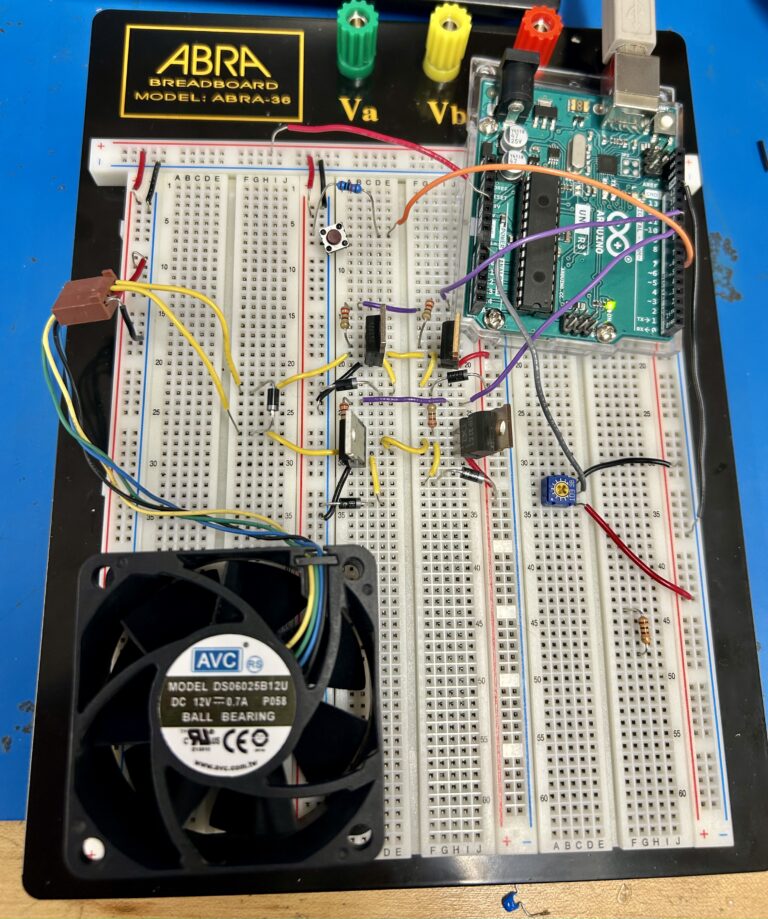
Circuit récepteur
Elle est composée de un module RX470, un décodeur HT12D et un driver de moteur L293D permettant de contrôler les moteurs
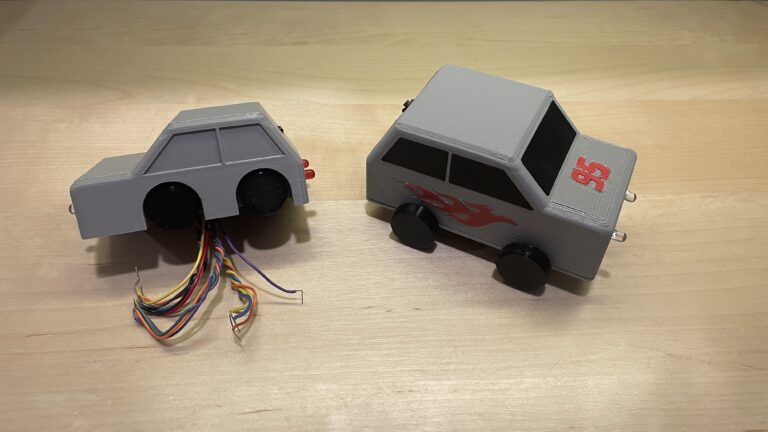
Intégration mécanique et conception 3D
Le projet ne se limitait pas à l’électronique. Une partie importante du travail a également porté sur l’intégration mécanique du système.
Une modélisation 3D a été réalisée avec Fusion 360 afin de :
- Concevoir une base pour supporter les composants
- Protéger les circuits électroniques
- Améliorer l’esthétique du robot
- Faciliter l’assemblage des différentes parties
Une carrosserie a également été conçue et imprimée afin de protéger les circuits internes contre les chocs.
Précision Technique du Projet
Ce circuit de télécommande ne fonctionne pas comme les systèmes RC traditionnels. Ici, les commandes sont de type marche/arrêt (on/off), et non proportionnelles. Cela signifie qu’il n’est pas possible de contrôler précisément des éléments comme des servos ou des ESC. Contrairement aux systèmes RC où un seul canal peut gérer deux actions (par exemple avancer et reculer), ce type de télécommande RF attribue une seule fonction par canal. En revanche, ces circuits sont beaucoup plus simples et surtout beaucoup moins coûteux, ce qui les rend idéaux pour des projets de base.
Pour l’alimentation de l’émetteur, il est possible d’utiliser une pile de 9V en ajoutant un régulateur de tension 7805 (5V). Bien que le module émetteur WL-102 fonctionne normalement sous 3,6V, il peut aussi fonctionner sans problème sous 5V. Une alternative consiste à utiliser un régulateur LD1117 (3,3V), mais attention : sa configuration de broches est différente de celle du 7805.
Du côté du récepteur, deux sources d’alimentation sont utilisées : une pile de 9V pour le circuit de réception, et une seconde alimentation pour les moteurs. Plusieurs options sont possibles pour ces derniers, comme 4 piles AA, une batterie LiPo 7,4V (2S) ou encore une batterie Li-ion.
Enfin, le circuit intégré L293B permet de piloter les moteurs avec une tension allant de 4V à 36V. Il est donc possible d’adapter l’alimentation selon le type de moteur utilisé. Toutefois, chaque sortie est limitée à un courant maximal de 1A. Il est donc important de ne pas utiliser de moteurs dépassant cette limite, au risque d’endommager le circuit.